

Якорные обмотки машин постоянного тока
Якорные обмотки современных машин постоянного тока представляют замкнутую систему проводников, уложенных в определенной последовательности в пазах якоря и присоединенных к коллектору.
Расчет параметров обмотки якоря рекомендуется начать с выбора коэффициента
uп = K / Z
(uп – это число элементарных пазов в реальном пазу) и определения числа коллекторных пластин:
K = uпZ,
где Z – число пазов (зубцов) якоря.
![]() ,
,
где Uном – номинальное напряжение питания
![]()
С другой стороны, максимальное число коллекторных пластин K max определяют диаметром коллектора Dк и минимально допустимым значением коллекторного деления tк. min:
tк. min = b к. min + Δ к. из,
где b к min – минимальная ширина коллекторной пластины; Δк. из – толщина межламельной изоляции.
Приняв Dк = 0,7Dа, tк. min = 5мм, ( bк. min = 4 мм, Δк. из = 1 мм), найдем
![]()
Примем К = 120, следовательно
uп = K / Z= 120/53=2,35
К = 2,3·53 = 119.85
Таким образом, целые числа uп и K должны удовлетворять условию
K min K = uпZ K max.
K min=59 K = uпZ=120 K max=161.772
Зная K = Zэ = S, (S – число секций), определяют число витков в секции:
![]() ,
,
где п
– угловая
скорость; Ea
= Uном(1
![]() Ra*);
а
– число пар параллельных ветвей обмотки
(необходимо помнить, что 2а
= 2р
–
для петлевой
обмотки,);
Ra*–
сопротивление цепи якоря в относительных
единицах (знак «минус» –
для
двигателя, знак «плюс» –
для генератора); Ra*
Ra*);
а
– число пар параллельных ветвей обмотки
(необходимо помнить, что 2а
= 2р
–
для петлевой
обмотки,);
Ra*–
сопротивление цепи якоря в относительных
единицах (знак «минус» –
для
двигателя, знак «плюс» –
для генератора); Ra*
![]() 0,05. Полученное
значение wc
следует округлить до ближайшего целого
числа.
0,05. Полученное
значение wc
следует округлить до ближайшего целого
числа.
Ea = Uном(1 Ra*) = 150( 1- 0,05) = 142.5
![]()
Далее определяют первый частичный шаг y1, результирующий шаг
y = yк (yк – коллекторный шаг) и второй частичный шаг y2.
y1п = Z / 2 р εп = ц. ч=(51/6)-0.5=8
y1 = uп y1п = 2,35·8= 18,8 ≈ 19
Для простой петлевой обмотки, как известно, имеем yк = y = 1,
при этом y2 = y1 – y = 19 – 1 = 18
После того как определили число коллекторных пластин и все шаги, вычерчиваем схему якорной обмотки рис. 6.
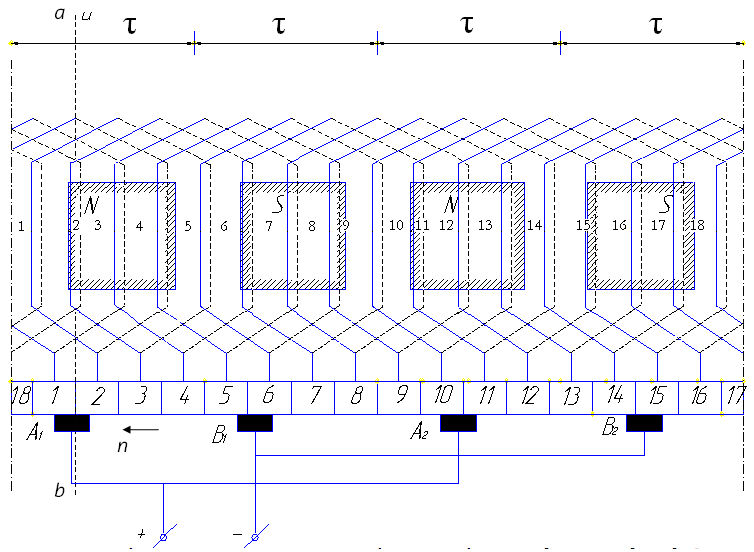
Рисунок 6. Схема-развертка простой петлевой обмотки при Zэ = S = K = 18; р = 2; y1 = 4; yк = 1
Схема–развертка якорной обмотки представляет собой вид на якорь сверху (полюса находятся над якорем) после разрезания цилиндрической поверхности якоря по образующей и развертывания ее на плоскости.
Электропривод постоянного тока
Основным средством приведения в движение рабочих машин является электрический двигатель, а, следовательно, основным типом привода служит электрический привод или электропривод (ЭП). Наиболее широко используют системы автоматизированного электропривода (АЭП). Современные АЭП выполняют в виде замкнутых систем автоматического управления.
Основными управляемыми параметрами (координатами) электропривода принято считать частоту вращения, ток, момент, точность позиционирования (положение).
В качестве примера, рассмотрим электропривод с двигателем постоянного тока независимого возбуждения (ДПТНВ). Электрическая схема системы управляемого ЭП постоянного тока с двигателем независимого возбуждения, включенного по системе «генератор двигатель» дана на рис. 7.
Для регулирования параметров ЭП используют типовые законы регулирования: П–закон (пропорциональный), И–закон (интегральный), ПИ–закон (пропорционально интегральный), ПИД–закон (пропорциональный интегрально дифференциальный), А–закон (апериодический). В данном случае выбираем П-закон регулирования.
По принципиальной схеме системы автоматизированного ЭП с ДПТНВ необходимо составить структурную схему (рис. 8).
Рис. 7. принципиальная схема ЭП ДПТНВ с регулятором по скорости
RP - устройство сравнения, Р - регулятор, УМ - усилитель мощности, ОBG-обмотка
возбуждения генератора, G - генератор, М - двигатель, ОВМ - обмотка
возбуждения двигателя, BR – тахогенератор
В структурной схеме каждый элемент электропривода представлен передаточной функцией (ПФ) Wi(s), где s – аргумент преобразования Лапласа.
Рис. 8. Структурная схема электропривода с ДПТНВ
Для анализа системы управления ЭП используют аппарат теории управления. Систему автоматического управления ЭП исследуют на устойчивость и определяют показатели качества. Устойчивость и качественные показатели ЭП определяют по переходному процессу. Построение переходного процесса является достаточно трудоемкой процедурой. Однако, существуют косвенные методы или критерии для определения устойчивости и качественных показателей.
Передаточные функции типовых элементов ЭП с ДПТНВ приведены в таблице 3.
Таблица 3 - Выражения передаточных функций Wi(s)
Wум(s) |
Wг(s) |
Wд(s) |
WBR(s) |
Wпи(s) |
Wп(s) |
Kyм |
|
|
|
|
Kп |
Проверим систему ЭП на устойчивость с помощью программы VisSim. Для этого построим переходный процесс рисунок 9. С помощью программы VisSim. Для устойчивой системы переходной процесс должен быть затухающим. Построив переходный процесс определили что он затухающий, следовательно, наша система устойчива.
Определим один из качественных показателей переходного процесса – время.
tпер.процесса = 15секунд