

Сформулировать требования к электроприводу подъема данного мостового крана и т.Д.
29. Требования к электроприводу подъемного крана.
Большинство пром. Подъемн. Кранов оборуд-ся ДПТ или перем. тока с реостатным регулированием скорости и момента. Более сложн. с высокой точностью с регулируемым источником питания ЭД. Выбор ЭП для кранов производится :
По грузоподъемности (Р), скорости передвижения, диапазон регулирования , жесткость мех. Характеристик, ПВ, число включений. Повт – кратковр. режим обычно повыш. Мех прочность и высокая перегрузочная способность
Автоматическое управление электроприводов. Необходимость автоматического управления.
31. Автоматическое управление электроприводов. Необходимость автоматического управления.
Автоматическое управление используют когда:
Сложная система управления приводом
Большое количество включений в час.
Агрессивная среда работы, где человеку нельзя находиться.
Когда есть необходимость в быстродействии производством.
Непредсказуемые условия работы ( ракеты ).
Автоматическое управление – управление без участия человека: может быть разомкнутое (без обратных связей); замкнутое (для поддержания в заданных пределах определенных параметров при этом вых сигнал сравнивается с входным);
=31.
Работа электропривода с маховиком. Каков выигрыш при использовании маховика.
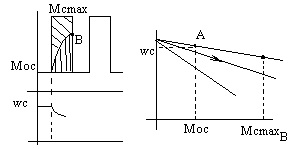
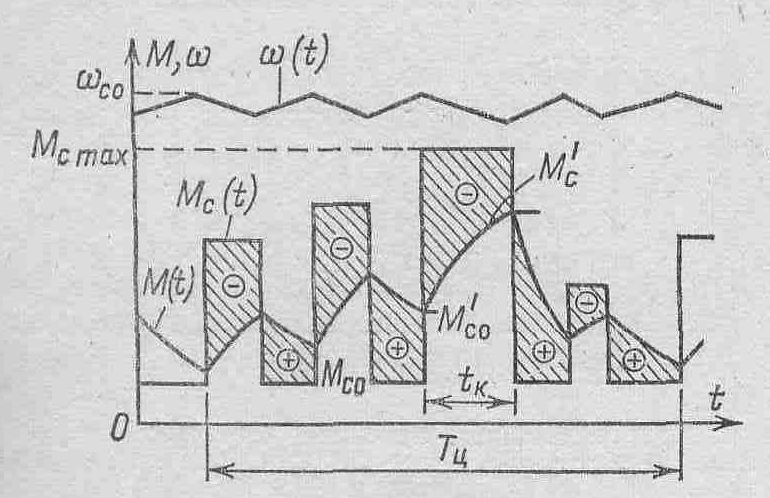
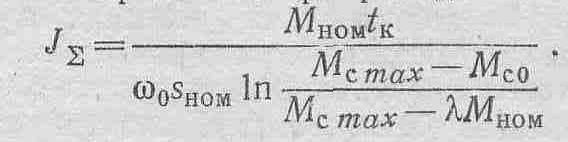
34. Работа с маховиком.
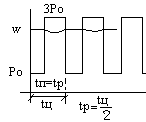
Для выравнивания нагрузки используют маховик
![]()
![]()
![]()
Механические характеристики двигателей постоянного тока последовательного возбуждения. Уравнение механической характеристики имеет вид
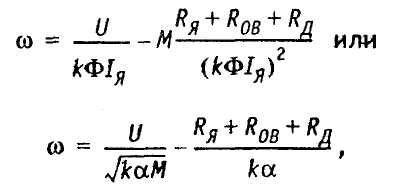 где
ω — частота вращения, рад/с; Rob —
сопротивление обмотки последовательного
возбуждения, Ом; α— коэффициент
линейной зависимости (в первом
приближении) магнитного потока от
тока якоря.
где
ω — частота вращения, рад/с; Rob —
сопротивление обмотки последовательного
возбуждения, Ом; α— коэффициент
линейной зависимости (в первом
приближении) магнитного потока от
тока якоря.
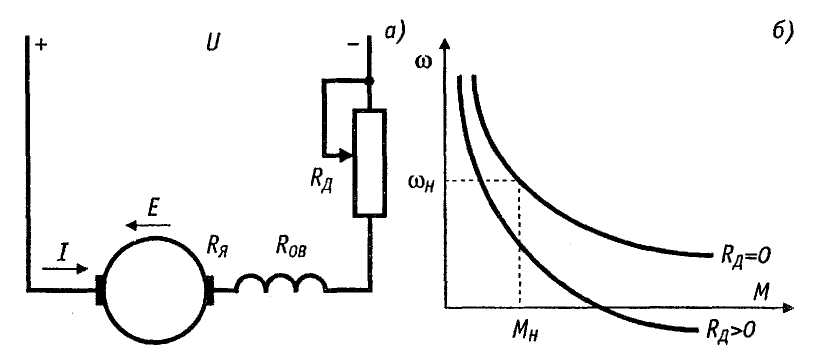
Рис. 17.6. Схема включения (а) и механические характеристики (б) двигателя постоянного тока последовательного возбуждения
Регулирование скорости вращения этого двигателя осуществляют путем введения в цепь якоря дополнительного сопротивления. Чем оно больше по величине, тем круче проходят механические характеристики (рис. 17.6, б). Регулируют скорость также путем шунтирования якоря.
Основные и вспомогательные движения металлорежущих станков.
36. Охарактеризовать основные и вспомогательные движения металлорежущих станков.
Обработка изделий на металлорежущих станках – это придание заготовке необходимой формы поверхности и размеров путём перемещения режущей кромки инструмента относительно заготовки, или заготовки относительно режущей кромки инструмента. Требуемое перемещение создаётся сочетанием движений инструмента и заготовки, эти движения называются основными или рабочими. Кроме основных движений в станках имеются вспомогательные движения, они не участвуют в процессе резания, но они нужны для различных наладочных операций, подвода и отвода инструмента, закрепление и снятие детали и т.д. Основные движения разделяются на главное (режущее) движение и движение подачи. С помощью главного движения происходит резание металла, а движение подачи обуславливает перемещение инструмента или обрабатываемой заготовки для снятия нового слоя металла. Эти движения могут быть как вращательными, так и поступательными, совершаются как заготовкой, так и инструментом.
Основные показатели регулирования скорости металлорежущих станков.