

Тормозные режимы электропривода с асинхронными и синхронными двигателями.
11. Тормозные режимы электропривода переменного тока с асинх и синхр двигателем.
АД:
*- противовключение (электрическое, силовое);
*- рекуперативное (электрическое изменение полюсов или частоты, силовое опускание груза и смена фаз);
*- электродинамическое (независимое, конденсаторное, самовозбуждением);
СД:
*-электродинамическое (обмотки статора замыкаются между собой и отключаются от сети, а на ротор подается напряжение, чем больше ток в роторе, тем дальше от оси петля);
*- рекуперативное (прямая линия, больше нуля двигательный режим, меньше генераторный)
Виды статических моментов для различных типовых механизмов.
13. Виды статических моментов для различных типовых механизмов.
Активного типа – не меняющий знак при изменении направления вращения (лифты, подъемники и т.д.)
Реактивного типа - меняющий знак (трение, обработка металла)
Достоинства и недостатки двигателей постоянного и переменного тока.
14. Достоинства и недостатки двигателей постоянного и переменного тока.
В машиностроении более широкое распространение получили трехфазные асинхронные двигатели, которые имеют следующие достоинства: малые габаритные размеры, простую конструкцию, высокую надежность (отсутствие подвижных контактов), жесткие механические характеристики (для двигателей с короткозамкнутым ротором). К недостаткам асинхронных двигателей нормального исполнения следует отнести: малую перегрузочную способность (Кп — 1,5 ... 2,5), узкий и ступенчатый диапазон регулирования частоты вращения (изменением числа пар полюсов). Однако за последнее время разработаны частотные полупроводниковые преобразователи, позволяющие осуществлять регулирование угловой скорости изменением частоты тока питающего напряжения.
Двигатели
постоянного тока
имеют следующие достоинства: широкий
и бесступенчатый диапазон регулирования
частоты вращения, который может быть
обеспечен в пределах D
=
![]() = 15 ... 5000, простоту регулирования частоты
вращения; жесткие механические
характеристики, удовлетворяющие
требованиям к приводам станков, в
частности, у двигателей с независимым,
параллельным возбуждением; большую
перегрузочную способность с коэффициентом
перегрузки в пределах Кп
= Мп
/Мн
=
2,5 ... 10, где Мп
— пусковой
момент, Мн
— номинальный момент; сравнительно
малую инерционность (достаточное
быстродействие).
= 15 ... 5000, простоту регулирования частоты
вращения; жесткие механические
характеристики, удовлетворяющие
требованиям к приводам станков, в
частности, у двигателей с независимым,
параллельным возбуждением; большую
перегрузочную способность с коэффициентом
перегрузки в пределах Кп
= Мп
/Мн
=
2,5 ... 10, где Мп
— пусковой
момент, Мн
— номинальный момент; сравнительно
малую инерционность (достаточное
быстродействие).
Однако у этих двигателей есть и существенные недостатки: сложность конструкции, сравнительно низкая надежность, значительные габаритные размеры на единицу мощности, а также то, что при их применении требуется преобразователь переменного тока в постоянный.
15. Синхронно-шаговые двигатели. Принцип работы. Возможность применения их для привода вентилятора.
15.Синхронно-шаговые двигатели. Принцип работы. Возможность применения их для привода вентилятора.
СШД - это СД, преобразующий команду, заданную импульсом, в фиксированный угол поворота вала или фиксированное перемещение без датчиков
Шаговые двигатели работают в комплекте с электронным коммутатором, переключающим обмотки управления с последовательностью и частотой, соответствующей заданной команде. При этом результирующий угол поворота строго соответствует числу переключений обмоток управления, направление поворота - порядку переключений, а частота вращения - частоте переключений. Каждая обмотка управления шагового двигателя соответствует обмотке фазы обычного СД. Напряжение питания обмотки управления представляет собой последовательность однополярных или разнополярных прямоугольных импульсов, поступающих от коммутатора. ШД делят на 4 основных группы:
1- с постоянными магнитами (активного типа),
2 - реактивные,
3 - индукторные,
4 - линейные
Обосновать какие двигатели и почему (синхронные, асинхронные и т.д.) целесообразно использовать для этой цели.
16. Обосновать какие двигатели и почему (синхронные, асинхронные и т.д.) целесообразно использовать для этой цели.
А) Диапазон, плавность, жесткость характеристики
Б) Осуществление реверса
В) Точность поддержания скорости
Г) Точность позиционирования
Д) Надежность, экономические показатели
Е) Низкая скорость
Ж) Быстродействие
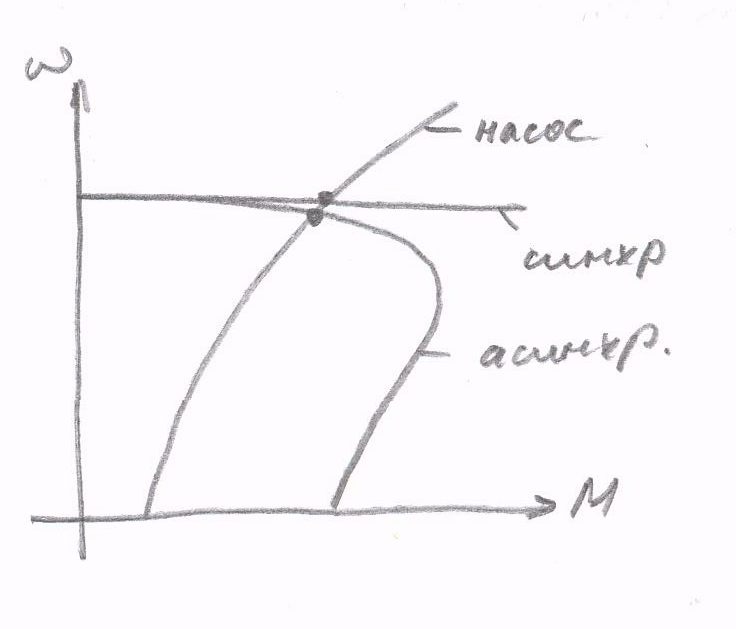
Нарисуйте механические характеристики синхронного и асинхронного электродвигателей, а также центробежного насоса. Укажите рабочую точку на их совместной характеристике.
17. Нарисуйте механические характеристики синхронного и асинхронного электродвигателей, а также центробежного насоса. Укажите рабочую точку на их совместной характеристике.
Укажите, какими способами можно регулировать частоту вращение синхронных и асинхронных электродвигателей. Дайте рекомендации для данной насосной станции.
18. Какими способами можно регулировать частоту вращения синхронных и асинхронных двигателей.
Нарисовать механические характеристики при этих способах
регулирования.
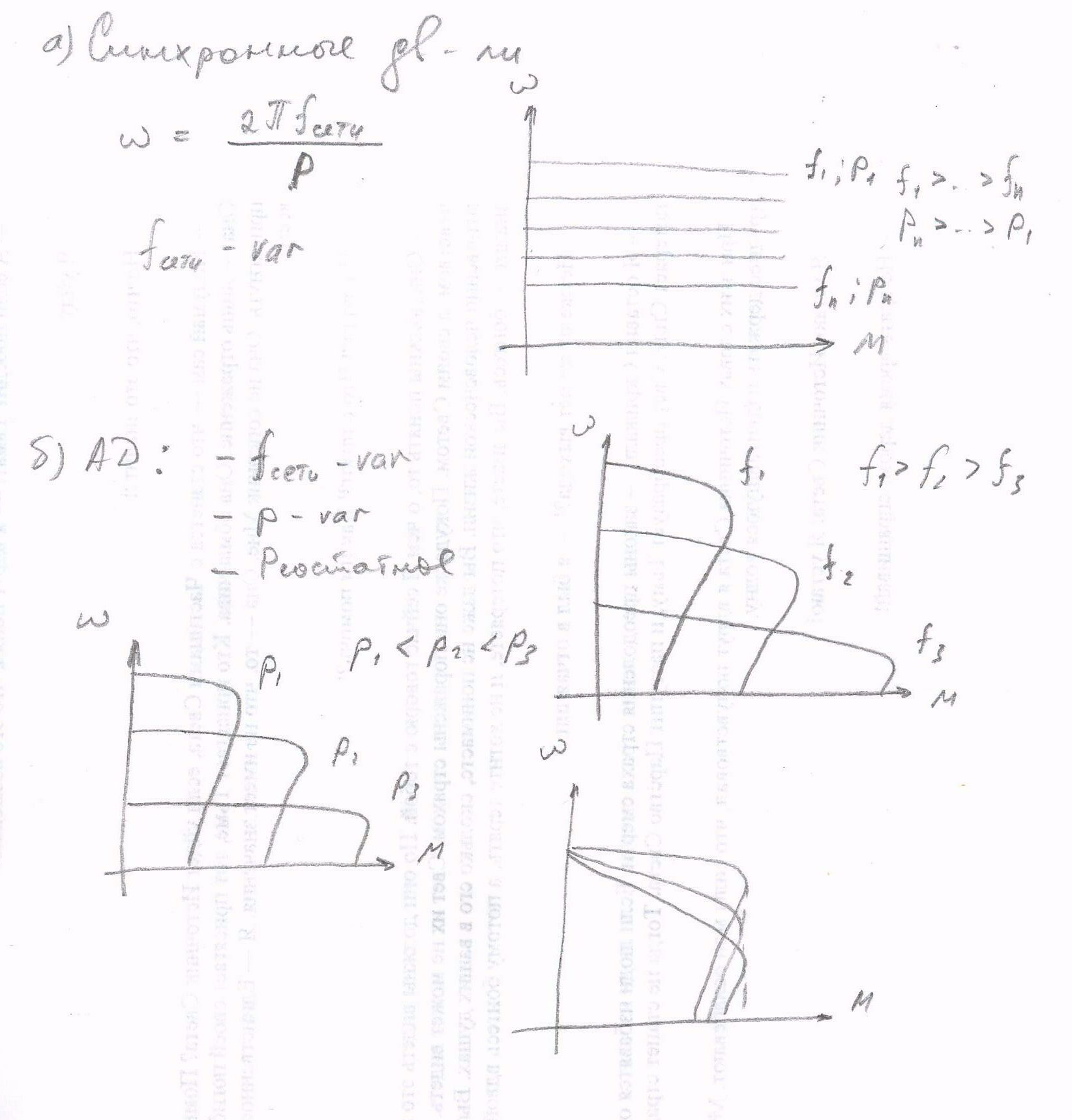
у АД: ещё изменением питающего напряжения в статорной цепи
Метод эквивалентных величин при расчете мощности двигателя.
Смотреть вопрос №21
Выбор мощности двигателей методом эквивалентных величин для длительного режима при различной во времени нагрузке.
21. Выбор мощности двигателей методом эквивалентных величин для длительного режима при различной во времени нагрузке.
В
случае длительной переменной нагрузки
(кривая 2 на
рис. 1.5) при выборе мощности двигателя
используют методы средних потерь или
методы эквивалентных величин
(эквивалентного тока, момента или
мощности). Выбирать двигатель по
средней мощности нельзя, поскольку его
нагрев пропорционален квадрату
тока![]() ,
а мощность имеет линейную зависимость
от тока Р=f(I).
,
а мощность имеет линейную зависимость
от тока Р=f(I).
Метод эквивалентного тока вытекает из метода средних потерь. Если сделать допущение, что потери в стали постоянные, то переменные потери P=I2R можно приравнять потерям при некотором эквивалентном по нагреву токе Iэкв. Тогда уравнение примет вид:
![]()
откуда
Двигатель удовлетворяет условиям нагрева, если Iэкв<Iном, где Iном — номинальный ток выбираемого двигателя.
Метод эквивалентного тока неприемлем для двигателей с глубоким пазом и двойной «беличьей клеткой», сопротивление обмотки ротора которых существенно изменяется.
Метод эквивалентного момента является производным от метода эквивалентного тока. Им удобно пользоваться, если имеется нагрузочная диаграмма M=f(t).
Этот метод менее точен, так как здесь предполагается, что магнитный поток двигателя (Ф) - величина постоянная: M = CФI=C1I, где С и С1 — постоянные коэффициенты.
В этом случае эквивалентный по нагреву момент можно определить по формуле, аналогичной выражению (1.9) и непосредственно вытекающей из него:

Метод
эквивалентной мощности
дает
более значительные погрешности, чем
метод эквивалентного момента, и
применяется при выборе двигателя с мало
изменяющейся частотой вращения. Учитывая,
что Р=![]() М=
0,105 пМ,
при
(
=const
в выражении (1.10) моменты можно заменить
соответствующими мощностями:
М=
0,105 пМ,
при
(
=const
в выражении (1.10) моменты можно заменить
соответствующими мощностями:
![]()
Методы эквивалентного момента и эквивалентной мощности применяют при выборе двигателей независимого возбуждения и асинхронных двигателей при скольжении, не превышающем номинальное значение.
При пониженной частоте вращения теплоотдача самовентилируемых двигателей ухудшается. Для учета этих факторов применяется формула

где
ni
и
nном
- соответственно фактическая и номинальная
частота вращения двигателя, мин-1;
tpi
- время
работы при частоте вращения ni
и
мощности Pi;
![]() i
=
о
+ (1—
о)*ni/nном
- коэффициент ухудшения теплоотдачи
при частоте вращения ni,
бо - коэффициент ухудшения теплоотдачи
при неподвижном роторе. Для закрытых
самовентилируемых двигателей
о=0,45-0,55
и для защищенных двигателей
о
=0,25-0,35.
i
=
о
+ (1—
о)*ni/nном
- коэффициент ухудшения теплоотдачи
при частоте вращения ni,
бо - коэффициент ухудшения теплоотдачи
при неподвижном роторе. Для закрытых
самовентилируемых двигателей
о=0,45-0,55
и для защищенных двигателей
о
=0,25-0,35.
7. Вопрос №6
Метод
средних потерь является
наиболее точным и основан на допущении,
что температура нагрева двигателя не
превысит допустимого значения, если
выполнено условие
![]()
где
![]() Рср
— средние потери в двигателе за цикл
работы;
Рср
— средние потери в двигателе за цикл
работы;
![]()
потери
в двигателе при номинальной нагрузке
и номинальном КПД;![]() ,
ном
- КПД двигателя при фактической и
номинальной нагрузке.
,
ном
- КПД двигателя при фактической и
номинальной нагрузке.
Вначале мощность двигателя находят ориентировочно по средней мощности с учетом коэффициента запаса к=1,2-1,3:
![]()
где
т
— число
изменений нагрузки за цикл. Затем с
помощью кривой КПД двигателя строят
график потерь
![]() и
находят средние потери по уравнению
и
находят средние потери по уравнению
![]()
Потери Pi при нагрузке двигателя Pi определяют по формуле
![]()
где i - КПД двигателя при коэффициенте нагрузки
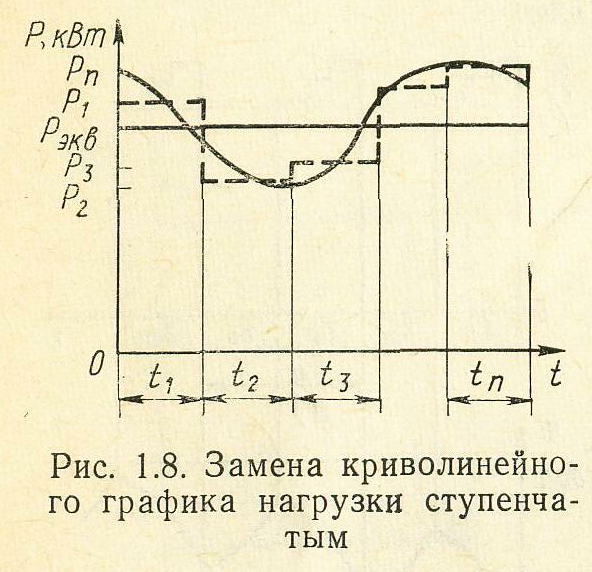
Если график нагрузки криволинейный, то для определения Рср его можно заменить эквивалентным ступенчатым (рис. 1.8).
![]()
Электродвигатель, выбранный по методу средних потерь, проверяют на возможные перегрузки и условия пуска. Перегрузки электродвигателя возможны только в пределах его перегрузочной способности, которую оценивают кратностью максимального момента или коэффициентом перегрузочной способности кп = Мтах/Мном, где Мтах, Мном - максимальный и номинальный моменты двигателя.
Коэффициент перегрузки двигателей постоянного тока ограничен условиями коммутации. Для двигателей независимого и смешанного возбуждения кп = 2-2,5, для двигателей последовательного возбуждения кп=2,5-3,0.
С помощью коэффициента перегрузочной способности асинхронного двигателя учитывают возможность снижения напряжения питающей сети на 15-20%, поэтому
![]()
Проверку соответствия пускового момента двигателя Мп начальному пусковому моменту рабочей машины Мс нач выполняют только для асинхронных двигателей с короткозамкнутым ротором, обладающих сравнительно малым пусковым моментом. Нормальные условия пуска обеспечиваются при условии Мп>МС Нач.
Для кратковременного режима работы выпускаются специальные двигатели, имеющие повышенную механическую прочность, усиленные обмотки и большую перегрузочную способность. Такие двигатели непригодны для длительного режима работы.
Выбор
двигателя осуществляется по номинальной
мощности Ркном![]() Р
и
длительности работы tk
(10,
30, 60 и 90 мин) с последующей проверкой на
пусковые условия и возможную перегрузку
(см. рис. 1.6).
Р
и
длительности работы tk
(10,
30, 60 и 90 мин) с последующей проверкой на
пусковые условия и возможную перегрузку
(см. рис. 1.6).
Использование
двигателей общепромышленного применения
для кратковременного режима нерационально,
так как их работа будет проходить при
низком КПД. В исключительных случаях,
для кратковременного режима, можно
использовать двигатели общепромышленного
применения меньшей мощности, допуская
их перегрузку при условии, что
температура нагрева в конце рабочего
цикла не превысит предельно допустимую
для данного класса изоляции. В этом
случае расчетный или эквивалентный
момент Mk=Mном/
T,
где
T
=![]() —
коэффициент тепловой перегрузки.
—
коэффициент тепловой перегрузки.
В повторно-кратковременном режиме работы привода выбор двигателя производится по каталогу двигателей повторно-кратковременного режима работы с учетом продолжительности включения и эквивалентной мощности. Выпускаются двигатели для повторно-кратковременного режима со стандартной продолжительностью включения 15, 25, 40 и 60%. Эквивалентная мощность для графика, приведенного на рис. 1.7, определяется по формуле
![]()
где коэффициент 0,75 учитывает ухудшение охлаждения при разгоне и торможении. По формуле (1.11) РЭкв определяется без учета пауз, так как паузы учтены параметром продолжительности включения.
Если фактическая продолжительность включения, рассчитанная по нагрузочной диаграмме (см. рис. 1.7), отличается от паспортного значения ПВПаcп, то требуемую мощность необходимо пересчитать по формуле
![]()