

107. Дать определение интерфейса.
107. Что такое интерфейсы?
В состав микропроцессорной системы или микро-ЭВМ помимо микропроцессора, в зависимости от ее назначения, может входить различное число устройств постоянной и оперативной памяти и периферийных устройств – внешних запоминающих устройств на магнитных лентах и дисках и разнообразных устройств ввода-вывода (дисплеев, печатавших устройств, аналого-цифровых и цифро-аналоговых преобразователей, различных датчиков и приемников информации и т.п.). При этом должна обеспечиваться возможность связи между этими устройствами и обмена информацией между ними с необходимой скоростью.
Устройства микропроцессорной системы связываются друг с Другом при помощи сопряжений, называемых интерфейсами.
Интерфейс представляет собой совокупность линий и шин, сигналов, электронных схем, алгоритмов (протоколов) процедур, обеспечивавших обмен информацией между устройствами системы. Производительность, надежность и эффективность использования МП-системы определяется не только характеристиками входящих в ее состав устройств, но в очень большой степени характеристиками интерфейсов, связывающих устройства системы.
108. Оперативные запоминающие устройства.
Запоминающие устройства (ЗУ) служат для приема, хранения и выдачи информации. Запоминающие устройства по выполняемым функциям делятся на оперативные и постоянные. Оперативные запоминающие устройства (ОЗУ) осуществляют запись, хранение и считывание информации и работают только при включенном питании, т. е. ОЗУ являются энергозависимыми. Постоянные запоминающие устройства (ПЗУ) хранят информацию при отключении питания, т. е. ПЗУ являются энергонезависимыми.
ОЗУ по виду хранения информации разделяются на статические и динамические. В статическом ОЗУ в качестве элемента памяти используется триггер, в динамическом - конденсатор. По-буржуйски ОЗУ называется RAM (random access memory - память с произвольным доступом). Статическое ОЗУ соответственно SRAM, динамическое DRAM.
Статическое озу
На рисунке 1 показана структура статического запоминающего устройства.
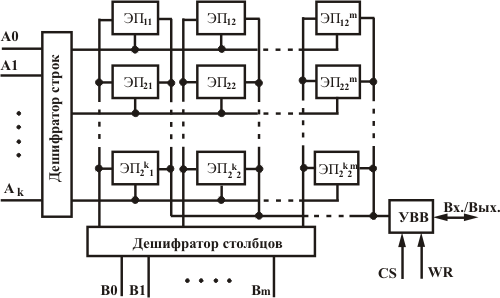
Рис. 1 - Структура статического ОЗУ
ЭП - это элемент памяти. Еще его называют запоминающим элементом (ЗЭ). Все эти элементы памяти заключены в матрице накопителя. Число элементов равно 2n, где n - целое число. Каждый конкретный ЭП хранит один бит информации и имеет свой адрес, задаваемый n-разрядным двоичным кодом. Для удобства адрес разбивают на две части (обычно одинаковые) - адрес строки и адрес столбца. В итоге получается прямоугольная матрица, содержащая 2k строк и 2m столбцов. Всего элементов памяти будет 2k+m. Поскольку число строк и число столбцов значительно больше, чем разрядность двоичного числа, между адресными входами и матрицей элементов памяти ставят дешифраторы, на рисунке обозначенные как дешифратор строк и дешифратор столбцов. Иногда в структуре микросхем ОЗУ между дешифратором столбцов и матрицей накопителя изображают ключи выбора столбцов.
Рассмотрим один из вариантов исполнения элемента памяти статического ОЗУ. Вот схемка:
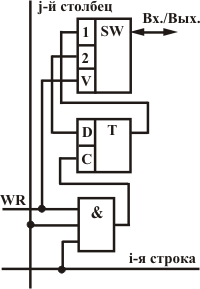
Рис. 2 - Элемент памяти статического ОЗУ
Собственно элементом памяти является D-триггер, находящийся на пересечении i-й строки и j-го столбца. Для уменьшения количества выводов микросхем ОЗУ совмещают входы и выходы в них. Поэтому на схеме введен еще и электронный ключ SW. При уровнях лог. 1 на линиях i и j и при подаче сигнала разрешения записи WR=1 (от буржуйского write - записывать), в триггер записывается информация, которая поступает на вход D. При этом шина Вх./Вых. оказывается подключенной к D входу триггера через электронный ключ SW и выполняет функции входа, при снятии сигнала WR ключ подключает к шине Вх./Вых. выход триггера, и эта шина выполняет функции выхода.
Если оператива одноразрядная, то шина Вх./Вых. будет общей для всех элементов памяти. Но чаще оперативы многоразрядные и в этом случае на каждой паре линий строка-столбец располагается по n триггеров и n ключей, где n-число разрядов, а элемент "И" при этом остается один. Естественно, что каждый из ключей подключается к своей шине Вх./Вых.
Помимо режимов записи и считывания, которые определяются потенциалом на входе WR, существует режим хранения данных, в котором запись и считывание запрещены. Режим хранения имеет двоякий смысл. Во-первых, если в устройстве много микросхем ОЗУ, что характерно, то запись или считывание ведется по одной микросхеме, остальные в этом случае должны быть отключены. Во-вторых, в режиме хранения данных энергопотребление намного меньше, чем в режиме записи и считывания (рабочий режим). Для перевода оперативы в режим хранения используется сигнал CS, по-буржуйски crystal selection - выбор кристалла. Обычно для перевода в режим хранения на вход CS подается уровень лог. 1, для перевода в рабочий режим - лог. 0.