

53. Классификация промышленных роботов.
53. Классификация промыш-х роботов (р).
Пром-е р. – автоматы или манипуляторы с программным управл-м, котор-е подраз-ют на технологи-е и транспортные ПР. Использование р. позволило расширить фронт работ по автоматизации технологич-х процессов, в связи с чем использ-ся классификация р. По назнач-ю: а) р. автоматич. линий (исполнит-е, обслужив-е, транспортн.); б) р. механич-ой обработки (обслужив-е станков с ЧПУ, кузнечно-штамповочн. р., литейные р.). Кроме того, р. можно распределить на универс-е, специализирован-е, электрические, гидравлич-е, пневматич-е – это по типу используемого привода; по грузоподъем-ти: до 1 кг – сверхлегкие, до200 – средние, до 1000 – тяжелые, более 1000 кг – сверхтяжел. Можно производить классификацию р. по числу манипуляторов - 2,3,4. По числу размещения р. их м-но подразделить на стационарные, переносные, подвижные, подвесные. По системам управления р. различают: жесткие, перепрограммир-е, обучающие, самообуч-е, адаптивные, интеллектуальные. По уровню сложности пром.р. можно подразделить на 7 классов: 1 – ручные манипуляторы (р. «глухие, немые, слепые», широко примен.в пром-ти), 2 – устр-ва типа «взять-положить» - жесткий автомат (уже использ-ют информ-ю об окр. среде), 3- программир-е манипляторы, 4 – р., обучаемые вручную, 5 – р., управл-е на языке програм-я, 6 - р., способные реагировать на окруж-ю среду, 7 – сенсорные, интеллектуальн. р.
54. Робототехнические устройства. Возможное кол-во степеней свободы у роботов. Экономическая целесообразность использования роботов.
54. Робототехнические устройства. Возможное кол-во степеней свободы у роботов. Экономич-я целесообразность использования роботов.
Применение роботов увеличивает произв-сть оборуд-я и выпуск продук-ции, улучшает кач-во прод-и, заменяет чел-ка на монотоно- тяжелых работах, они обладают достаточной гибкостью. Значимость роботизации не в замене чел-ка при обслуживании машин, а в том, что робототехника позволила: во-первых, повысить производительность, во-вторых, объединить разрозненное технологич-е оборуд-е в комплексные гибкие автоматизиров-е производственные системы, в-третьих, в ряде случаев, исключить вредное влияние на чел-ка. Макс-но возм-е кол-во степеней свободы – 6: 3 –поступат-но по осям и 3- вращат-но по осям. При внедрении роботов на предприя-е необх-мо учитывать: не целесообразно использовать отдельно примен-е роботы, т.к. на них нужно столько же затрат, что и на группу роботов, экономич-ки выгодно применять несколько роботов. Кроме того, неэф-но использ-ть робот только в одну смену и при крупносерийном произ-ве (там можно поставить манипулятор). Также учитывают, сколько раз м-но перепрограм-ть робот.
55. Конденсаторный способ пуска трехфазного асинхронного электродвигателя от однофазной сети.
Иногда в распоряжении домашнего мастера оказывается трехфазный двигатель той или иной мощности. Одной из задач при использовании такого двигателя является его подключение к сети, как правило - однофазной, 220 вольт. что бы заставить двигатель крутиться, приходится прибегать к дополнительным ухищрениям. Существуют несколько способов подключения трехфазного электродвигателя к однофазной сети 220 В. Если обмотки соединены в «звезду», то нужно их соединить в «треугольник».
Наиболее простой способ запуска базируется на подключении третьей обмотки электродвигателя через фазосдвигающий конденсатор. Полезная мощность, развиваемая двигателем в этом случае составляет 50...60% от его мощности в трехфазном включении. Для нормальной работы электродвигателя с конденсаторным пуском необходимо, чтобы емкость используемого конденсатора менялась в зависимости от числа оборотов. На практике это условие выполнить довольно сложно, поэтому используют двухступенчатое управление двигателем. При пуске двигателя подключают два конденсатора, а после разгона один конденсатор отключают и оставляют только рабочий конденсатор.
Р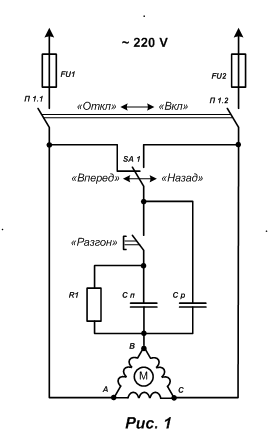 ис.
1 Принципиальная схема включения
трехфазного электродвигателя в сеть
220 в., где
ис.
1 Принципиальная схема включения
трехфазного электродвигателя в сеть
220 в., где
С р - рабочий конденсатор;
С п - пусковой конденсатор;
П1 - пакетный выключатель
После включения пакетного выключателя П1 замыкаются контакты П1.1 и П1.2, после этого необходимо сразу же нажать кнопку «Разгон», После набора оборотов кнопка отпускается. Реверсирование электродвигателя осуществляется путем переключения фазы на его обмотке тумблером SA1.
Емкость пускового конденсатора Сп выбирают в 2..2,5 раза больше емкости рабочего конденсатора. Эти конденсаторы должны быть рассчитаны на напряжение в 1,5 раза больше напряжения сети. Для сети 220 В лучше использовать конденсаторы типа МБГО, МБПГ, МБГЧ с рабочим напряжением 500 В и выше. При условии кратковременного включения в качестве пусковых конденсаторов можно использовать и электролитические конденсаторы типа К50-3, ЭГЦ-М, КЭ-2 с рабочим напряжением не менее 450 В.
Д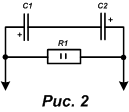 ля
большей надежности электролитические
конденсаторы соединяют последовательно,
соединяя между собой их минусовые
выводы, т. е. получается как бы неполярный
конденсатор, и шунтируют резистором R1
с сопротивлением 200...300 Ом
ля
большей надежности электролитические
конденсаторы соединяют последовательно,
соединяя между собой их минусовые
выводы, т. е. получается как бы неполярный
конденсатор, и шунтируют резистором R1
с сопротивлением 200...300 Ом
Резистор R1 необходим для удаления оставшегося электрического заряда на конденсаторах. Общая емкость соединенных конденсаторов составит (С1+С2)/2.
Мощность электродвигателя квт |
0,4 |
0,6 |
0,8 |
1,1 |
1,5 |
2,2 |
Минимальная емкость рабочего конденсатора Ср мкф |
40 |
60 |
80 |
100 |
150 |
230 |
Минимальная емкость пускового конденсатора Сп мкф |
80 |
120 |
160 |
200 |
250 |
300 |