

Лабораторная работа №1
Определение момента инерции и электромеханической постоянной времени электропривода постоянного тока
1.1. Цель работы
Изучить механическую часть электропривода. Уяснить физическую сущность параметров момента инерции, махового момента и электромеханической постоянной времени и их влияние на динамику электропривода.
Изучить и освоить метод свободного выбега по определению приведенного момента инерции и электромеханической постоянной времени электропривода.
1.2. Подготовка к работе
Для выполнения лабораторной работы студенты должны изучить разделы 2.3 и 7.1, 7.2 /1/ или раздел 1.1, 1.2 / 2 /. При этом важно усвоить, что механическая часть электропривода является его основным звеном и что момент инерции и электромеханическая постоянная времени очень важны для оценки динамических характеристик и качеств электроприводов. В практике момент инерции определяется экспериментально одним из методов: крутильных и маятниковых колебаний, падающего груза и свободного выбега (самоторможения). Первые три метода применимы в основном лишь для отдельных вращающихся частей электропривода: ротора (якоря) самого электродвигателя, муфт и т.д. Для определения момента инерции крупных двигателей и всего электропривода в целом, включая исполнительные механизмы, наиболее пригоден метод свободного выбега. По этому методу электропривод разгоняется на холостом ходу до установившейся скорости. Затем двигатель отключается от сети и под действием сил трения электропривод начинает самотормозиться, затрачивая на это кинетическую энергию вращающихся частей.
![]() (1.1)
(1.1)
где Jпр - приведенный момент инерции электропривода,
![]() -угловая
скорость вращения на холостом ходу.
-угловая
скорость вращения на холостом ходу.
В расчетах электроприводов часто пользуются маховым моментом GD2, количественная связь которого с моментом инерции определяется выражением,
![]() (
1.2)
(
1.2)
где m и G - соответственно масса и вес вращающихся частей электропривода,
![]() и D
- приведенные радиус и диаметр инерции.
и D
- приведенные радиус и диаметр инерции.
При самоторможении в любой момент времени динамический момент привода, соответствующий запасенной кинетической энергией вращающихся масс, уравновешивается моментом сопротивления
![]() (1.3)
(1.3)
Имея кривую
самоторможения
![]() полученную опытным путем (см.рис.1.1 ),
можно определить приведенный момент
инерции
полученную опытным путем (см.рис.1.1 ),
можно определить приведенный момент
инерции
![]() , (1.4
)
, (1.4
)
где
![]() -
определяется касательной, проведенной
в любой точке к кривой
.
-
определяется касательной, проведенной
в любой точке к кривой
.
Обычно касательная проводится в точке , в которой наиболее просто опытным путем определяется Р0, Рвр и Мвр.

рис. 1.1 Кривая самоторможения
Определив приведенный момент инерции привода, можно найти его электромеханическую постоянную времени, используя для этого уравнение движения электропривода:
![]() , (1.5
)
, (1.5
)
которое при условии, что момент нагрузки Мст= const, может быть преобразовано / 1 / к виду
![]() , (1.6
)
, (1.6
)
где Мк - момент короткого замыкания или начальный пусковой момент.
В уравнении (1.6 )
величина
![]() называется электромеханической
постоянной времени Тм
(измеряется в с ). Она характеризует
интенсивность протекания переходного
процесса, определяя время, в течение
которого электропривод, обладая моментом
инерции J,
разгоняется из неподвижного состояния
до угловой скорости идеального холостого
хода под действием неизменного момента,
равного начальному пусковому моменту
двигателя.
называется электромеханической
постоянной времени Тм
(измеряется в с ). Она характеризует
интенсивность протекания переходного
процесса, определяя время, в течение
которого электропривод, обладая моментом
инерции J,
разгоняется из неподвижного состояния
до угловой скорости идеального холостого
хода под действием неизменного момента,
равного начальному пусковому моменту
двигателя.
1.3. Рабочее задание
Ознакомиться с электрооборудованием, его функциональным назначением и схемой лабораторной установки.
Записать паспортные данные электрических машин, перечень, тип приборов, входящих в состав лабораторной установки.
Определить полное сопротивление якорной цепи электродвигателя постоянного тока.
Снять и построить график выбега , определить значения Jпр, GD2 и Тм
1.4. Порядок выполнения работы
Для определения полного сопротивления якорной цепи электродвигателя постоянного тока использовать метод "вольтметра-амперметра". Для этого затормозить якорь двигателя и, не подавая ток в обмотку возбуждения LМ, через реостат R2 (60-100 Ом) подключить якорь двигателя (рис.1.2) к сети постоянного тока. С помощью реостата R2 установить в якорной цепи ток Iа = 2,5 А и.по вольтметру V2 (предел измерения до 60 В) зафиксировать показания Uа. Данные измерений занести в таблицу 1.1.
Таблица 1.1
Измерено |
Вычислено |
|||||||||||
Ua |
Iа |
U0 |
I0 |
|
Rα |
P0 |
Pвр |
Мвр |
Jпр |
GD2 |
C |
Tм |
В |
А |
В |
А |
с-1 |
Ом |
Вт |
Вт |
Нм |
кгм2 |
кгм2 |
Вс |
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
2. Собрать схему по рис. 1.2. (вольтметр V2 не подключать!). Выключателем Q2 подать постоянный ток в обмотку возбуждения двигателя, а выключателем Q1 запустить этот двигатель. При пуске, пользуясь реостатом R2, необходимо следить, чтобы не было больших бросков тока в якорной цепи (более 4-5 А). Полностью вывести реостат (R2=0) и зафиксировать показания U0, I0 и по соответствующим приборам. Данные измерений занести в таблицу 1.1.
3. Для снятия кривой выбега необходимо выключателем Q1 отключить двигатель и одновременно включить электрический секундомер.
Заполнить таблицу 1.2
Таблица 1.2.
t, c |
0 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
45 |
50 |
|
|
|
|
|
|
|
|
|
|
|
|
Опыт повторить дважды, чтобы исключить ошибки измерений.
1.5. Указания по обработке результатов измерения
Момент на валу двигателя при достижении установившегося режима определяется моментом сопротивления, который на холостом ходу обусловлен потерями вращения
![]() , (
1.7 )
, (
1.7 )
здесь мощность вращения
![]() , (
1.8 )
, (
1.8 )
где
![]() (
1.9 )
(
1.9 )
- мощность, потребляемая двигателем из сети,
![]() (
1.10 )
(
1.10 )
- потери мощности в якорной цепи.
В формулах (1.9 ) и
(1.10) U0
и I0
- соответственно напряжение и ток
холостого хода;
![]() - полное сопротивление якорной цепи.
- полное сопротивление якорной цепи.
Начальный пусковой момент двигателя постоянного тока независимого возбуждения связан с полным сопротивлением якорной цепи зависимостью /1/
![]() , (
1.11 )
, (
1.11 )
где
![]() -
постоянная двигателя (при условии, что
-
постоянная двигателя (при условии, что![]() )
)

рис. 1.2 Принципиальная электрическая схема для определения приведенного момента инерции привода
Подставив (1.11) в выражение, определяющее электромеханическую постоянную времени, получим
![]() , (
1.12 )
, (
1.12 )
Постоянную С можно получить из уравнения электрического равновесия якорной цепи двигателя
![]() , (
1.13 )
, (
1.13 )
Контрольные вопросы
Какое влияние оказывают Jпр, GD2 и Тм на работу электроприводов в статических и динамических режимах?
Какие достоинства и недостатки имеет метод свободного выбега перед другими экспериментальными методами по определению приведенного момента инерции?
В чем заключается основная суть (теоретические основы) метода свободного выбега?
4. Почему наиболее целесообразно определять приведенный момент инерции в точке кривой , соответствующей холостому ходу?
5. Какие погрешности свойственны методу свободного выбега?
Лабораторная работа №2
Исследование регулировочных свойств электропривода с двигателем постоянного тока независимого возбуждения
2.1. Цель работы
Освоить основные способы регулирования скорости двигателей постоянного тока (ДПТ) независимого возбуждения. Получить практические навыки по снятию электромеханических и механических характеристик электропривода.
Дать оценку регулировочным свойствам ДПТ с независимым возбуждением.
2.2. Подготовка к работе
Для выполнения лабораторной работы студентам необходимо изучить разделы 3.1 - 3.3 и 4.1 - 4.4 / 1 / или 2.1, 2.2 и 3.1 -3,4/ 2 /.
В соответствии с уравнением электромеханической характеристики ω=f(I) имеющим вид
![]() , (
2.1 )
, (
2.1 )
возможны три основные способа регулирования угловой скорости двигателей постоянного тока:
изменением подводимого к якорю двигателя напряжения U;
изменением сопротивления R цепи якоря путем введения дополнительных резисторов (реостатов);
изменением магнитного потока Ф двигателя (тока возбуждения).
Электромеханические характеристики ДПТ с независимым возбуждением представляют собою прямые линии. При этом следует усвоить, что указанные принципиально различные способы регулирования существенно различаются соответственно и по регулировочным возможностям.
Регулирование угловой скорости двигателя изменением потока возбуждения простое и экономичное, но его возможности ограничены - регулирование можно осуществить лишь во второй зоне регулирования, т.е. при скорости выше основной (рис.2.1, характеристики 1)
Реостатное регулирование неэкономично из-за значительных потерь энергии, выделяемых в виде теплоты в реостатах.. К тому же характеристики имеют малую жесткость, в связи с чем невысок диапазон регулирования (рис.2.1, характеристики 2).
При регулировании скорости изменением напряжения, подводимого к якорю двигателя, получаются жесткие электромеханические характеристики (рис.2.1, характеристики 3). Это наиболее эффективный способ регулирования, и в сочетании с регулированием изменения магнитного потока в замкнутых системах электропривода позволяет получить диапазон регулирования скорости D=10000:1.
Следовательно, ДПТ с независимым возбуждением обладают высокими регулировочными свойствами. Однако, учитывая их высокую стоимость и недостаточную надежность по сравнению с асинхронными двигателями, их применение целесообразно лишь в глубокорегулируемых электроприводах и в приводах, требующих больших пусковых моментов.
Следует уяснить и запомнить, что у ДПТ с независимым возбуждением возможны тяжелые (аварийные) режимы работы в случае потери возбуждения. Это вытекает из уравнения (1.1) электромеханической характеристики: скорость стремится к неограниченному возрастанию — двигатель "идет вразнос".
Учитывая, что
![]() ,
нетрудно из уравнения (2.1) получить
уравнение механической характеристики
,
нетрудно из уравнения (2.1) получить
уравнение механической характеристики
![]() :
:
![]() (
2.2 )
(
2.2 )
По виду механические характеристики аналогичны электромеханическим, т.е. также являются прямыми линиями.
Стенд для снятия механических (и электромеханических) характеристик, принципиальная схема которого представлена на рис.2.2, в своем составе имеет электромашинный агрегат, состоящий из ДПТ независимого возбуждения и связанного с ним валом электромагнитного тормоза. Этот тормоз выполняет роль нагрузочного устройства для ДПТ.
2.3. Рабочее задание
Ознакомиться с электрооборудованием, его функциональным назначением и схемой лабораторной установки.
Записать паспортные данные двигателя постоянного тока, электромагнитного тормоза и перечень приборов, входящих в состав лабораторной установки.
Снять и построить естественную механическую характеристику ДПТ с независимым возбуждением.
Исследовать работу электропривода и снять механические характеристики при реостатном регулировании угловой скорости.
То же, что и в п.4, но при регулировании скорости изменением потока возбуждения и затем - при изменении напряжения, подводимого к якорю двигателя.
Построить механические характеристики
 ,
полученные в соответствии с пл.4-5.
,
полученные в соответствии с пл.4-5.Дать оценку регулировочным свойствам ДПТ независимого возбуждения и определить диапазоны регулирования угловой скорости электропривода при различных способах регулирования.
|
рис.2.1. Электромеханические характеристики ДПТ независимого возбуждения |

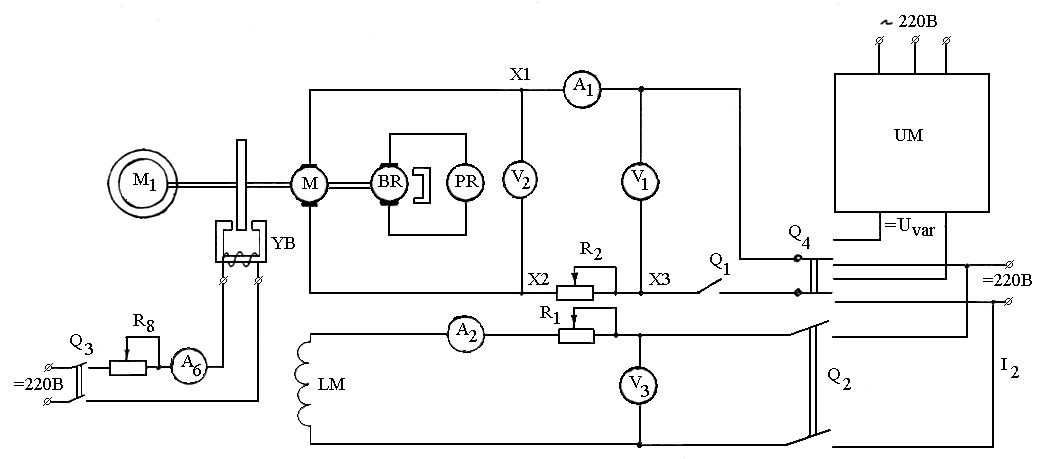
рис.2.2 Принципиальная схема электропривода с ДПТ независимого возбуждения
2.4. Порядок выполнения работы
1. Проверить и установить в исходное состояние коммутирующие и регулирующие аппараты на панели стенда.
2. Снять естественную
электромеханическую характеристику
![]() ДПТ с независимым возбуждением. Для
этого переключатель Q4
установить в положение "=220B".
Включить вводные автоматические
выключатели переменного и постоянного
тока. Выключателем Q2
подать номинальное (сетевое) напряжение
на обмотку возбуждения двигателя
(напряжение и ток возбуждения
проконтролируйте по соответствующим
приборам: вольтметру V3
и амперметру A2).
Включите выключатель Q1
и реостатом R2
плавно разгоните двигатель до максимальной
скорости (до полного вывода реостата
R2).
Затем включите выключатель Q3
и с помощью реостата R8,
увеличивая ток в обмотке возбуждения
электромагнитного тормоза YB
и соответственно нагрузку на двигатель,
зафиксировать 5-6 значений скорости
ДПТ с независимым возбуждением. Для
этого переключатель Q4
установить в положение "=220B".
Включить вводные автоматические
выключатели переменного и постоянного
тока. Выключателем Q2
подать номинальное (сетевое) напряжение
на обмотку возбуждения двигателя
(напряжение и ток возбуждения
проконтролируйте по соответствующим
приборам: вольтметру V3
и амперметру A2).
Включите выключатель Q1
и реостатом R2
плавно разгоните двигатель до максимальной
скорости (до полного вывода реостата
R2).
Затем включите выключатель Q3
и с помощью реостата R8,
увеличивая ток в обмотке возбуждения
электромагнитного тормоза YB
и соответственно нагрузку на двигатель,
зафиксировать 5-6 значений скорости
![]() .
При этом предельное значение тока
нагрузки, контролируемого амперметром
в якорной цепи двигателя, ограничить
значением
.
При этом предельное значение тока
нагрузки, контролируемого амперметром
в якорной цепи двигателя, ограничить
значением
![]() .
Отключение привода произвести в обратном
порядке.
.
Отключение привода произвести в обратном
порядке.
3. Снятие реостатных
характеристик
выполняется в том же порядке, как и в
п.2. При этом при разгоне двигателя
реостат R2
выводится лишь на 1/3, что примерно
соответствует
![]() =10
Ом. Сняв реостатную характеристику при
таком положении реостата, вывести его
далее еще на треть длины, что примерно
будет соответствовать
=5
Ом. Снять вторую реостатную характеристику
при этом положении реостата.
=10
Ом. Сняв реостатную характеристику при
таком положении реостата, вывести его
далее еще на треть длины, что примерно
будет соответствовать
=5
Ом. Снять вторую реостатную характеристику
при этом положении реостата.
4. Исследование
работы двигателя и снятие электромеханических
характеристик
при регулировании скорости изменением
потока возбуждения выполняется по
аналогии с п.2. При этом реостат R2
в якорной цепи выводится полностью, а
в цепи возбуждения с помощью реостата
R1
устанавливается ток
![]() .
Затем искусственная электромеханическая
характеристика снимается при токе
возбуждения
.
Затем искусственная электромеханическая
характеристика снимается при токе
возбуждения
![]()
5. Для исследования
работы двигателя при регулировании
угловой скорости изменением напряжения
необходимо якорную цепь двигателя
подключить к регулятору напряжения UМ
- переключатель Q4
установить в положение "=![]() ".
Электромеханические характеристики
снять при номинальном токе возбуждения
двигателя и якорных напряжениях
".
Электромеханические характеристики
снять при номинальном токе возбуждения
двигателя и якорных напряжениях
![]() и
и
![]() в том же порядке, что и в п.2.
в том же порядке, что и в п.2.
6. Данные всех измерений (по пп. 2-5) свести в таблицу 2.1.
Таблица 2.1
№опыта |
Измерено |
Вычислено |
Примечание |
|||||||||||
UЯ В |
IЯ А |
n об/мин |
UВ В |
IВ А |
с-1 |
с Вс |
М Нм |
P2 Вт |
P1 Вт |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
естественная характеристика |
||
|
|
|
|
|
|
|
|
|
|
|
|
искусственные характеристики |
RaΣ=var |
Rдоп=10 Ом |
|
|
|
|
|
|
|
|
|
|
|
|
Rдоп=5 Ом |
||
|
|
|
|
|
|
|
|
|
|
|
|
IВ=var |
IВ=0,9IВН |
|
|
|
|
|
|
|
|
|
|
|
|
|
IВ=0,8IВН |
||
|
|
|
|
|
|
|
|
|
|
|
|
UЯ =var |
UЯ=0,75 UЯН |
|
|
|
|
|
|
|
|
|
|
|
|
|
UЯ=0,5 UВН |
||
2.5. Указания по обработке результатов измерения
При расчете КПД
электропривода
![]() ,
(2.3) мощность Р1,
потребляемую двигателем из сети можно
определить, пользуясь выражением
,
(2.3) мощность Р1,
потребляемую двигателем из сети можно
определить, пользуясь выражением
![]() (2.4),
(2.4),
а выходную мощность Р2 двигателя по формуле
![]() , (2.5)
, (2.5)
Здесь в (2.5) угловая скорость и момент М на валу двигателя находятся соответственно из зависимостей
![]() (2.6)
(2.6)
![]() (2.7)
(2.7)
Постоянный коэффициент![]() двигателя (при
условии постоянства магнитного потока
Ф ) можно найти
двигателя (при
условии постоянства магнитного потока
Ф ) можно найти
![]() (2.8)
(2.8)
где
![]() -
паспортные номинальные значения
напряжения, тока и угловой скорости
двигателя.
-
паспортные номинальные значения
напряжения, тока и угловой скорости
двигателя.
Сопротивление якорной цепи двигателя можно определить из выражения
![]() (2.9)
(2.9)
где
![]() номинальный
КПД двигателя (по паспорту).
номинальный
КПД двигателя (по паспорту).
Коэффициент С при
изменении магнитного потока Ф находится
также из соотношения (2.8). При этом угловая
скорость
берется из измеренных значений при токе
нагрузки
![]()
2.6. Контрольные вопросы
Электромеханические и механические характеристики и их значение в электроприводе.
Что такое регулирование угловой скорости электроприводов? Какие основные способы регулирования угловой скорости известны для электроприводов с ДПТ независимого возбуждения?
Как можно осуществить реверс ДПТ с независимым возбуждением?
Может ли работать ДПТ независимого возбуждения при отсутствии возбуждения? Какие последствия возможны, если во время работы двигателя исчезнет возбуждение?
Дать оценку регулировочным свойствам ДПТ с независимым возбуждением и основным показателям регулирования скорости (диапазон, плавность, стабильность и т.д.).
Дать оценку жесткости механических характеристик при различных способах регулирования скорости ДПТ независимого возбуждения.
Исходя из полученных опытных данных, определить диапазоны регулирования угловой скорости при различных способах ее регулирования.
Как определить диапазон регулирования угловой скорости и чем ограничиваются верхние и нижние значения угловой скорости электропривода?
Лабораторная работа №3.
Исследование системы генератор-двигатель (Г-Д)