

Мех оборудование
38. Под типом гусениц понимают их конструктивное оформление, характеризующее гусеницы в эксплуатационном и производственном отношениях.
По способу передачи давления на грунт различают многоопорные и малоопорные гусеницы.
Гусеницы называют многоопорными, если отношение числа опорных звеньев (траков), лежащих на земле, к числу опирающихся на них катков ведущих и направляющих колес меньше двух (рис. 12.3, а). В этом случае звенья между опорными катками почти не прогибаются и обеспечивают равномерное давление на грунт как под катками, так и между ними. У малоопорной гусеницы это отношение больше двух: звенья легко прогибаются между катками, сгибаясь в шарнирах и образуя волнистую линию, при этом создается значительная разница между давлениями под катками и между ними (рис. 12.3, б). Поэтому многоопорная гусеница применяется на экскаваторах, перемещающихся по породам со слабой несущей способностью, а малоопорная — по прочным.
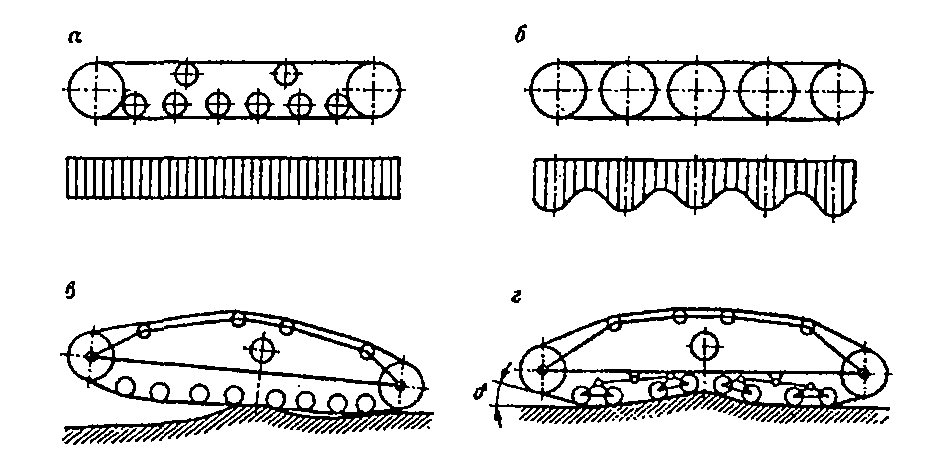
На слабых породах малоопорная гусеница в большей степени погружается в почву, чем многоопорная, однако лучше переносит сосредоточенные нагрузки, возникающие при работе экскаватора на скальных породах, так как имеет более прочные большие катки. Малоопорные гусеницы обычно снабжаются четырьмя— пятью катками большого диаметра, многоопорные — шестью— восемью катками небольшого диаметра.
Мех оборудование
41. Привод ковшовой цепи у экскаваторов с ковшами вместимостью до 1 ООО л осуществляется с помощью рабочего механизма, состоящего из редуктора и электродвигателя, а у более мощных экскаваторов — из двух электродвигателей и двух последовательно расположенных редукторов. Второй редуктор (обычно планетарный) совмещается с предохранительной муфтой. На мощных экскаваторах, кроме главного привода ковшовой цепи, устанавливается еще и вспомогательный М2, способный передвигать цепь со скоростью в 15—20 раз меньшей, чем номинальная. Этот привод необходим для осмотра, смазки и ремонта цепи.
Для предохранения цепи и ковшей от поломки при встрече с непреодолимым препятствием в кинематическую цепь привода ковшовой цепи всегда включается предохранительное устройство. В качестве последнего используют роликовые, фрикционные (преимущественно пластинчатые) муфты, муфты-тормоза с плавающей рамой и зажимными роликовыми или колодочными звеньями, управляемыми рычажной системой от пневмо- или гидроцилиндров.
У современных цепных экскаваторов скорость ковшовой цепи достигает 1,35 м/с.
Привод роторного колеса состоит из редуктора (простого или планетарного) и двигателя. На мощных экскаваторах привод может иметь несколько двигателей и редукторов.
Редукторная часть привода ротора может быть размещена на стороне ковшового колеса, внутри него или на конвейерной стороне. Выбор местоположения привода при конструировании роторных экскаваторов определяется многими факторами, среди которых особенно важную роль играют расположение центра тяжести головки ротора (идеальное — на оси роторной стрелы) и достижение максимально возможных углов, подхода ротора к забою в вертикальной и горизонтальной плоскостях.
Опоры двигателя крепят к раме редуктора. Двумя своими подшипниками редуктор опирается на вал ротора и еще в одной точке — на ферму стрелы ротора. Установка в этом месте упруго-демпфирующей подвески (УДП) редуктора, которая наиболее компактно выполняется в виде пневмогидравлического амортизатора (ПГА) с нелинейной характеристикой жесткости и демпфирования, обеспечивает гарантированное снижение динамических явлений в приводе ротора и металлоконструкциях верхнего строения экскаватора, стабилизирует поведение рабочего органа в забое, увеличивает надежность и долговечность экскаватора.
УДП служит для осуществления упругой связи редуктора привода ротора со стрелой и состоит из двух систем: упругого элемента и устройства, уменьшающего амплитуды перемещений (демпфера).
Механизм выдвижения стрелы. Основные требования к приводу выдвижения стрелы — быстродействие и точность установки — обусловливают необходимость применения, так же как и в лебедках подъема стрелы, системы Г-Д. Особенность работы привода заключается в том, что статический момент может изменяться в широких пределах, а двигатель может работать в генераторном режиме (при выдвижении стрелы вниз или втягивании сверху вниз).
Механизм выдвижения роторной стрелы выполняется зубчато-реечным при малых ходах выдвижения (до 15 м) и канатным при больших. Применение выдвижной стрелы увеличивает массу экскаватора на 20—25 %, но, с другой стороны, резко уменьшает неравномерность нагружения ходового механизма.
Погрузочные устройства предназначены для погрузки породы в вагоны одного состава и рядом стоящего без просыпания ее на междупутье. На экскаваторах малой и средней мощности для этой цели применяются погрузочные воронки, на мощных многоковшовых цепных или роторных — конвейерные погрузочные устройства (рис. 11.14).
Последние представляют собой систему, состоящую из распределительного поворотно-выдвижного конвейера 1 (поворотного и выдвижного) и четырехвороночного распределителя 2. Распределитель подвижен относительно оси путей и вагонов 3.
Рис. 11.14. Погрузочное
устройство мощного многоковшового
экскаватора
43. Механизмы управления позволяют обеспечивать требуемый режим работы машины или изменять его по желанию оператора путем дистанционного воздействия на исполнительные органы.
Пневмосистема предназначена для управления тормозами механизмов экскаватора. Принципиальная схема пневмосисгемы приведена на рис. 11.22.
 Рис.
11.22. Схема пневмосистемы экскаватора
ЭКГ-5А:
Рис.
11.22. Схема пневмосистемы экскаватора
ЭКГ-5А:
I — компрессор; 2 — фильтры; 3 — обратный клапан; 4 — маслоотделитель; 5 — манометр; 6 — предохранительный клапан; 7 — воздухосборник; 8 — запорный вентиль; 9 — электропневматические распределители; 10—цилиндры; II — звуковой сигнал; 12 — реле давления
Электрокомпрессор 1 засасывает воздух через фильтр 2 и нагнетает его через обратный клапан 3 в маслоотделитель 4 ив воздухосборник 7, который имеет предохранительный клапан б и запорный вентиль 8 для слива жидкости. Сжатый воздух из воздухосборника через распределители 9 поступает в тормозные цилиндры 10 и растормаживает механизмы экскаватора. Давление в пневмосистеме контролируется манометром 5. Для автоматического включения или отключения электрокомпрессора предусмотрено реле давления 12. Для сигнализации имеется звуковой сигнал 11.
Гидравлические системы управления с силовыми цилиндрами характеризуются компактностью, высоким кпд, независимым расположением управляемых элементов, высокой точностью отработки подаваемых сигналов; быстродействием и возможностью передачи больших мощностей. Эти системы чувствительны к температурным воздействиям, что требует применения различных рабочих жидкостей в летних и зимних условиях.
Экскаваторы оснащаются следующими системами гидравлического управления: насосной и электрогидравлической.
Давление в насосной системе, необходимое для включения рабочих механизмов, создается насосом. Поток рабочей жидкости направляется с помощью рычагов управления через соответствующие распределительные устройства.
На рис. 11.23 показана схема насосной системы гидравлического управления цилиндрами переключения тормозов одноковшового экскаватора. Жидкость, поступающая из маслобака, нагнетается насосом 7 к тормозному цилиндру 3 механизма хода и через золотники 4 к
цилиндрам 1 и 2 муфт переключения гусениц. В гидросистему включены редукционный клапан 6 и манометр 5.
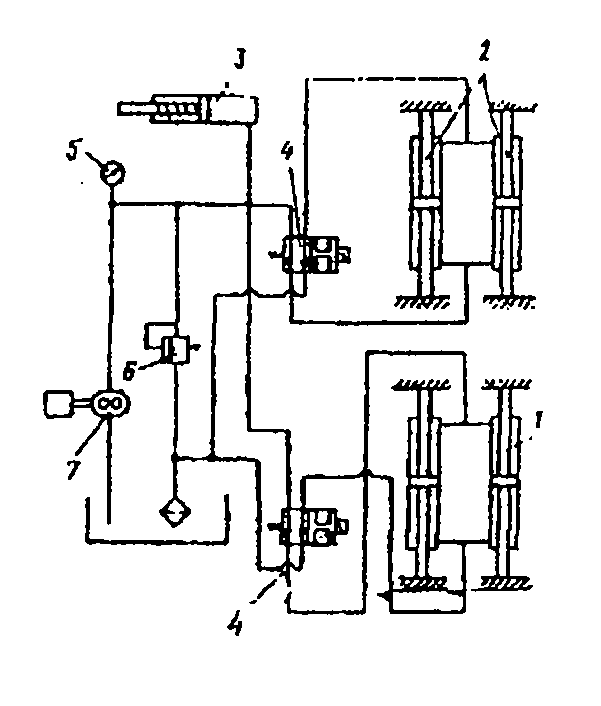
Рис. 11.23. Схема гидросистемы экскаватора ЭКГ-5А:
1,2 — левые и правые цилиндры муфты переключения; 3 — цилиндры тормоза привода хода; 4 — золотник с электромагнитом; 5 — манометр; б — редукционный клапан; 7— шестеренный насос.