

БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Стандартизация, метрология и информационные системы»
Разработка кинематической схемы
и расчет параметров привода
стола измерительного прибора
Лабораторная работа № 1
по дисциплине «Детали приборов»
2012
Цель работы: Изучить методики построения кинематических схем типовых узлов измерительных приборов, определения мощности электродвигателя, проведения проектировочного и проверочного кинематического расчета привода стола измерительного прибора в процессе проектирования на стадии технического предложения.
Задачи:
Ознакомиться с условными обозначениями кинематических элементов механизмов.
Разработать кинематическую схему привода стола измерительного прибора с продольным перемещением.
Описать принцип работы привода стола измерительного прибора с продольным перемещением.
Определить требуемую мощность электродвигателя привода стола измерительного прибора.
Выполнить проектировочный кинематический расчет и выбрать тип электродвигателя привода стола измерительного прибора.
Выполнить проверочный кинематический расчет привода стола измерительного прибора.
Общие сведения о кинематических схемах
Кинематические схемы в зависимости от основного назначения подразделяются на принципиальные, структурные и функциональные. Правила выполнения кинематических схем устанавливают ГОСТ 2.701-84, 2.703-68, 2.770-68, 2.721-74.
На принципиальной кинематической схеме с помощью условных графических обозначений или упрощенных контурных очертаний изображают совокупность кинематических элементов и их соединений. Схема показывает, как осуществляется регулирование, управление и контроль заданных движений исполнительного органа. Схему строят без применения масштаба, но приблизительно отражают соотношение размеров изображаемых элементов.
Как правило, принципиальную кинематическую схему выполняют в виде развертки (рисунок 1). Каждому кинематическому элементу схемы присваивают порядковый номер, начиная от источника движения, и буквенно-цифровые позиционные обозначения. Покупной или заимствованный механизм нумеруют одним номером, без разбивки на элементы. Валы нумеруют римскими цифрами.
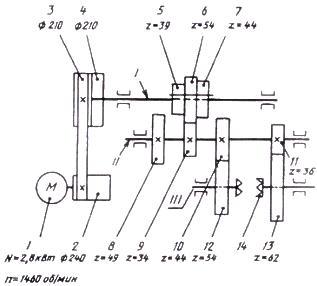
Рисунок 1 – Принципиальная кинематическая схема редуктора
Толщина линий, изображающих валы, оси, стержни, шатуны, кривошипы, равна s. Толщина линий, изображающих контуры зубчатых колес, червяков, звездочек, кулачков и других элементов, равна s/2. Допускается вписывать схему-развертку для наглядности в контур изделия, толщина линий которого равна s/3 (рисунок 2).
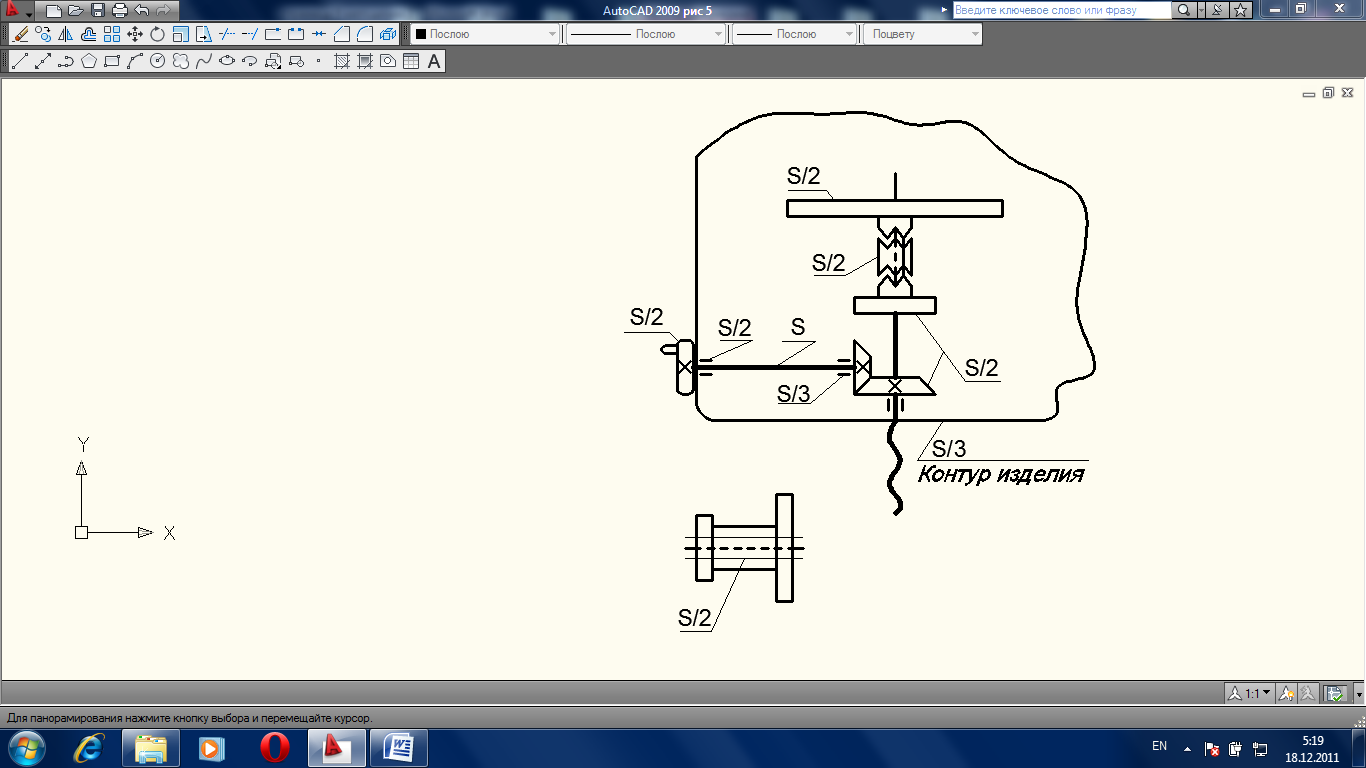
Рисунок 2 – Толщины линий, применяемые для изображения различных элементов
Для упрощения чтения схем допускается условно изгибать и поворачивать валы и оси вместе с кинематическими элементами механизма, а также перемещать их за пределы контура изделия (рисунок 3).
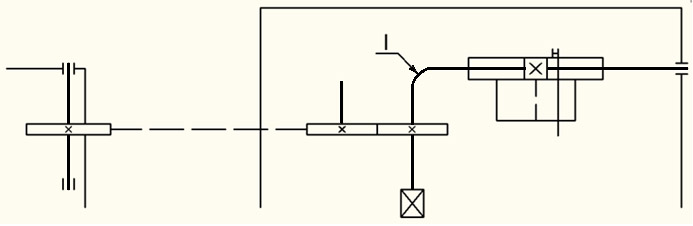
Рисунок 3 – Связь сопряженных элементов, вычерченных отдельно
Невидимый участок вала изображают штриховой линией s/2 (рисунок 4). На проекциях, перпендикулярных оси вращения, они изображаются штрихпунктирной линией (рисунок 5).
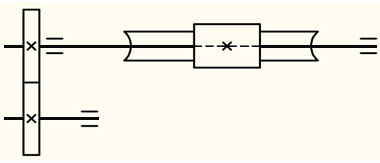
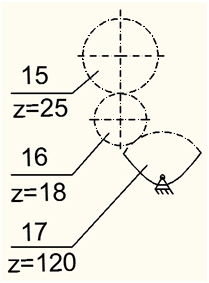
Рисунок 4 – Изображение невидимых на схеме частей вала, оси |
|
Рисунок 5 – Изображение зубчатых колес на не главном виде |
При наличии механизма, собираемого и регулируемого отдельно, допускается его упрощенное изображение. Контур такого механизма обводят сплошной тонкой сплошной линией s/3 (рисунок 6).
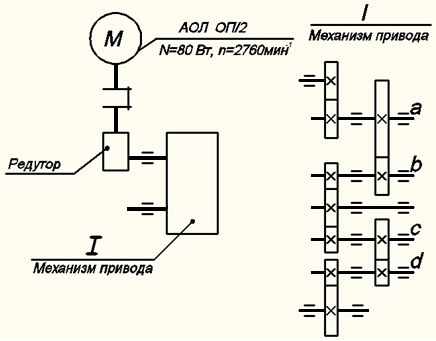
Рисунок 6 – Изображение отдельно собираемых и самостоятельно регулируемых механизмов.
Расположение механизмов на принципиальной схеме соответствует положению исполнительных органов – исходному, среднему или рабочему. Можно применять поясняющие надписи, а также изображать крайние положения элементов штрихпунктирной линией (рисунок 7), указывать основные характеристики и параметры элементов (рисунок 8).
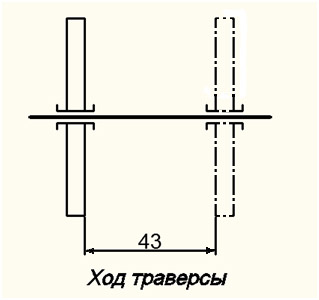
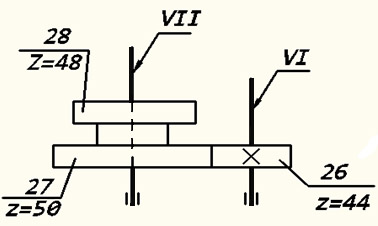
Рисунок 7 – Изображение элемента, меняющего своё положение |
|
Рисунок 8 – Обозначение характеристик элементов на схеме |
В приложении 1 даны наиболее часто встречающиеся в кинематических схемах обозначения элементов и направлений движения.
Если схема содержит точные механизмы и пары (отсчетные, делительные и др.), указывают все данные по кинематической точности: степень точности передачи; допустимые относительные смещения; повороты; наличие «мертвых ходов» между основным ведущими и исполнительными элементами.
Для динамического анализа кинематическая принципиальная схема должна содержать необходимые размеры и характеристики элементов и наибольшие нагрузки для основных ведущих элементов. Должен быть выявлен характер опор в зависимости от их функционального назначения (приложение 2).