

6.5 Гидроакустический корреляционный лаг
6.5.1 Принцип действия
Принцип действия корреляционного лага основан на измерении времени, затрачиваемого судном на прохождение некоторого участка пути, длина которого определяется расстоянием между вибраторами гидроакустической антенны лага и принятым алгоритмом обработки информации.
Сущность процесса определения скорости можно понять, рассмотрев следующую упрошенную схему. Предположим, что на судне вдоль диаметральной плоскости (ДП) размешены две гидроакустические приёмопередающие антенны А1 и А2
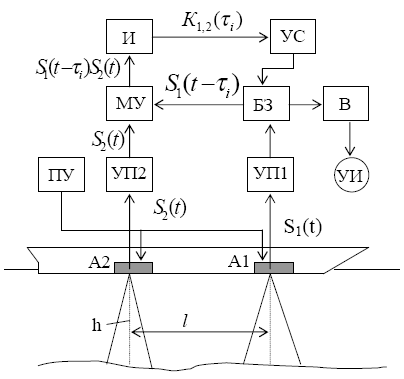
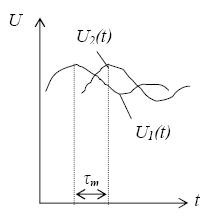
Рис. 6.10 Рис. 6.11
(рис. 6.10) на расстоянии l друг от друга. В режиме излучения эти антенны совместно с передавшим устройством (ПУ) формируют импульсы, которые распространяются в сторону дна, отражаются от него и возвращаются обратно. Принимаемые антеннами сигналы будут зависеть от отражающей способности грунта, рельефа дна, от параметров среды их распространения и представлять собой некоторые случайные процессы U1(t) и U2(t), изменяющиеся во времени (рис. 6.11). В связи с тем, что при отсутствии дрейфа судна антенна А2 проходит над теми же участками дна, что и антенна А1, процессы U1(t) и U2(t) будут аналогичны друг другу, но сдвинуты по времени на величину m, которая получила название транспортного запаздывания. Очевидно, величина транспортного запаздывания зависит от расстояния l между антеннами и скорости V движения судна. В рассматриваемом случае будет иметь место следующее равенство:
![]() (6.16)
(6.16)
Отсюда может быть найдена скорость судна:
![]() (6.17)
(6.17)
Учитывая, что база l известна, задача определения скорости сводится к оценке значения транспортного запаздывания m.
Транспортное запаздывание m определяется путём искусственной задержки сигнала первой антенны с помощью регулируемого блока задержки БЗ (рис. 6.10), который осуществляет смешение процесса U1(t) (рис. 6.11) вдоль оси времени. Для каждой задержки i рассчитывается значение взаимной корреляционной функции (ВКФ) и эти значения сравниваются между собой. Очевидно, что при i =m смешение сигнала первой антенны вдоль оси времени будет таким, что процессы практически совпадут и величина ВКФ будет максимальной.
Учитывая сказанное, каждый корреляционный лаг должен включать в себя (рис. 6.10):
антенную систему A:
передающее устройство ПУ;
усилители - преобразователи УП для придания принятому сигналу вида, удобного для дальнейшей обработки;
регулируемый блок задержки БЗ;
коррелятор, состоящий из множительного устройства МУ и интегратора И;
устройства сравнения УС значений корреляционных функций;
вычислитель В скорости, пути, пройденного судном и других величин; устройства индикации УИ.
Рассмотрим особенности устройства отдельных систем лага.
6.5.2 Передающий тракт
Передающий тракт включает в себя передающее устройство и антенную систему. Основной задачей передающего устройства является формирование сигнала посылки с заданными параметрами. В корреляционных лагах обычно используется импульсный режим излучения. Формирование сигнала посылки осуществляется типовыми схемами, такими же, как и в других гидроакустических системах.
В качестве антенн используются
пьезокерамические вибраторы направленного
действия. Как правило, эти вибраторы
устанавливаются в одном антенном блоке
подобно тому, как это делается в
доплеровских лагах. Отличаются антенны
ориентацией плоскостей вибраторов.
Если в доплеровских лагах плоскости
вибраторов наклонены к оси антенного
блока, то в данном случае они перпендикулярны
этой оси с тем, чтобы создавалось
вертикальное излучение.
качестве антенн используются
пьезокерамические вибраторы направленного
действия. Как правило, эти вибраторы
устанавливаются в одном антенном блоке
подобно тому, как это делается в
доплеровских лагах. Отличаются антенны
ориентацией плоскостей вибраторов.
Если в доплеровских лагах плоскости
вибраторов наклонены к оси антенного
блока, то в данном случае они перпендикулярны
этой оси с тем, чтобы создавалось
вертикальное излучение.
К
Рис. 6.12
Д иаграмма
направленности каждого вибратора
достаточно широкая
иаграмма
направленности каждого вибратора
достаточно широкая
![]() ,
что при расстоянии между вибраторами,
равном 3 см, обеспечивает устойчивую
работу прибора в процессе плавания.
Частота излучаемого сигнала составляла
150 кГц, что позволяло лагу работать,
используя отраженные от дна сигналы до
глубин, примерно равных 200 м.
,
что при расстоянии между вибраторами,
равном 3 см, обеспечивает устойчивую
работу прибора в процессе плавания.
Частота излучаемого сигнала составляла
150 кГц, что позволяло лагу работать,
используя отраженные от дна сигналы до
глубин, примерно равных 200 м.
При необходимости получения большего объема или более точней информации о параметрах движения судка используются белее сложные по составу антенные блоки и, как следствие, передающие устройства, вырабатывающие различные по характеристикам сигналы посылок.
И
Рис. 6.13