

11. Бесконтактные (вентильные) двигатели постоянного тока.
Бесконтактные двигатели постоянного тока:
Двигатели постоянного тока обладают хорошими регулированными характеристиками электромашины и т.д. Но наличие скользящего контакта ограничивает область их применения. От этого недостатка свободны бесконтактные (вентильные) двигатели постоянного тока. При замене механического коммутатора-коллектора с щетками полупроводниковым коммутатором двигатель постоянного тока становится более надежным и долговечным, создает меньше радиопомех.
В отличие от обычного коллекторного двигателя бесконтактный двигатель постоянного тока обладает рядом характерных особенностей.
1.Силовая обмотка якоря расположена на стороне и из нескольких катушек, сдвинутых относительно друг друга в пространстве. Ротор выполняют в виде постоянного магнита.
2.Положение магнитного потока ротора по отношению к осям катушек силовой обмотки статора определяется бесконтактным двигателем (трансформаторными, индукционными магнитоэлектрическими, фотоэлектрическими и т.д.).
3.Бесконтактный (полупроводниковый) коммутатор осуществляет коммутацию катушек силовой обмотки статора по сигналам датчиков положения.
Такая конструкция позволяет сохранить основную особенность электрической машины постоянного тока, состоящую в том, что частота переключения катушек обмотки якоря определяется частотой вращения ротора.(аналогично коллекторным машинам)
Принципиальная схема одного из вариантов бесконтактного двигателя имеет вид.
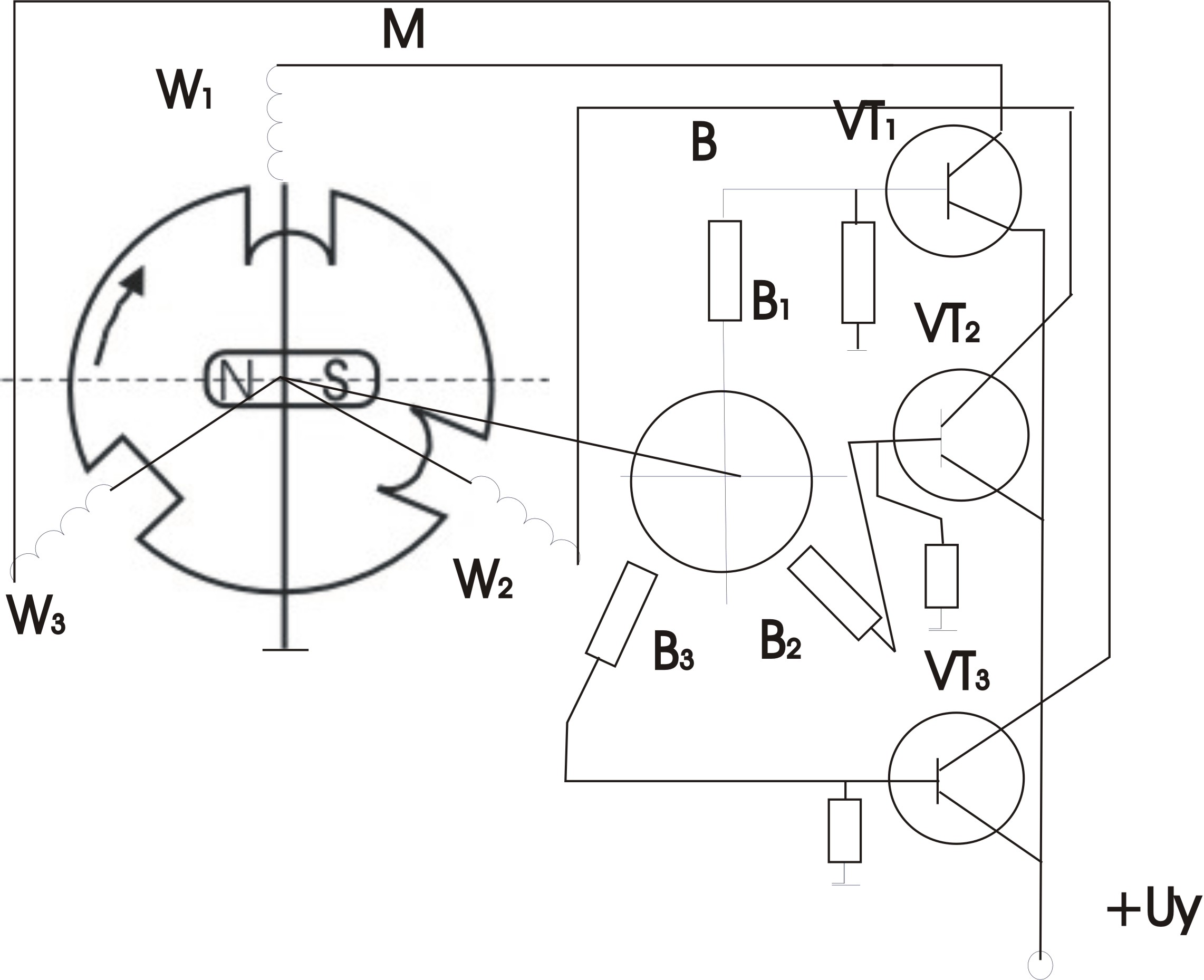
Рис. Принципиальная схема бесконтактного двигателя постоянного тока.
В бесконтактном двигателе коммутация секций W1 – W3 обмотки, расположенной на статоре двигателя осуществляется транзисторными ключами VT1 – VT3 коммутатора по сигналам датчика положения В ротора. В положении, указанному на рисунке, сигнал с чувствительного элемента В1, находящегося в поле управляющего магнита (на рис. Заштрихован), жестко связанного с ротором, открывает ключ VT1. Выводы обмотки W1 оказывается подключенными к источнику питания Uy. Так, пробегающий по обмотке, создает магнитный поток, взаимодействующий с полем постоянного магнита, и ротор поворачивается по часовой стрелке Ключ VT1 закрывается, обмотка W1 обесточивается, но одновременно появляется сигнал с элемента В2, к которому подойдет магнит и открывается ключ VT2 и т.д.
Рассмотренный бесконтактный двигатель по принципу работы аналогичен коллекторному двигателю благодаря наличию позиционной ОС., осуществляемой датчиком положения ротора.
Применение полупроходного коммутатора улучшает условия коммутации и открывает новые возможности построения схем управления и регулирования частоты двигателя.
Вентильный двигатель по принципу действия близок к синхронному двигателю.
Изменение частоты вращения ротора приводит к соответствующим изменениям частоты переключения транзисторов коммутатора, а следовательно, к изменению частоты вращения поля статора, т.е. ротор и поле статора имеют одинаковую (синхронную) частоту вращения. Эта частота вращения зависит также напряжения сети: с увеличением U она растет, наводя в обмотках большую ЭДС. Т.о. частота вращения ротора n и частота тока f в рассматриваемом двигателе является функциями напряжения сети и нагрузка на валу.
n(U1Me)=60f/P
Это соотношение типично для синхронной машины.