

30. Система импульсно-фазового управления тиристорами (сифу) в автоматизированных электроприводах.
Регулирование напряжения тиристорных преобразователей, применяемых для автоматизированного ЭП в подавляющем большинстве случаев осуществляется за счёт изменения угла открывания тиристоров . С этой целью каждый тиристорный преобразователь снабжается системой управления, которая обеспечивает формирование управляющих импульсов, а также сдвиг этих импульсов по фазе относительно анодного напряжения тиристоров. Такие системы называются импульсно - фазовыми.
СИФУ могут быть много и одноканальными. В многоканальных СИФУ управляющие импульсы формируются для каждого тиристора (или группы тиристоров при последовательном или параллельном соединении) отдельно, в своём канале. Так, для трёхфазной нулевой схемы выпрямления потребуется три канала формирования и сдвига управляющих импульсов, а для трёхфазной мостовой - шесть каналов.
В одноканальных системах управления формирование импульсов происходит в одном канале, а затем уже импульсы распределяются по тиристорам специальными распределителями.
В одноканальных системах управления значительно легче получить симметрию управляющих импульсов, но система усложняется за счёт применения специальных распределителей.
Преимущество получили многоканальные СИФУ.
По типу фазосдвигающего устройства различают несколько разновидностей СИФУ: со статическим фазовращающим мостом, с полуволновым магнитным усилителем с “вертикальным” управлением и т.д.
Наибольшее применение в тиристорных преобразователях ЭП нашли СИФУ с “вертикальным” управлением.
Принцип “вертикального” управления состоит в том, что на входе формирователя импульсов производится сравнение переменного (опорного) и регулируемого постоянного напряжения. Последнее является напряжением управления UУ . В момент равенства этих двух напряжений формируется управляющий импульс. Изменяя значение постоянного напряжения, можно получить сдвиг управляющего импульса по фазе относительно анодного напряжения.
Структурная схема СИФУ, работающего по принципу “вертикального” управления, имеет вид
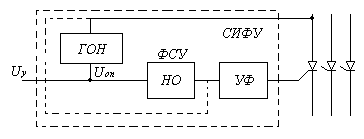
Рис. Структурная схема СИФУ с “вертикальным”
управлением.
Управляющее напряжение Uу поступает на вход фазосдвигающего устройства (ФСУ), в котором сравнивается с опорным напряжением, вырабатываемым генератором опорного напряжения (ГОН), которое (как мы увидим ниже) перемещается по вертикали. При равенстве напряжений на выходе нуль - органа (НО) появляется сигнал, который проходит через блок усиления и формирования импульсов (УФ) и поступает на управляющий электрод тиристора.
Принцип “вертикального” управления можно понять из рис., приведенного для случая, когда опорное напряжение представляет собой линейно - изменяющееся во времени (пилообразное) напряжение.
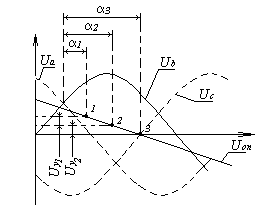
Рис. Графики, поясняющие принцип вертикального
управления СИФУ.
На рис. кроме графиков опорного напряжения Uоп и напряжения управления Uу показано сплошной линией кривая анодного напряжения Uа соответствующего тиристора и кривые напряжения двух других фаз Uв и Uс при трёхфазной схеме выпрямления показаны штриховыми линиями.
Управляющий импульс формируется в момент равенства спорного напряжения и напряжения управления.
Если напряжение управления Uу1 , то импульс будет сформирован и подан на тиристор в момент времени, соответствующий т.1. при этом угол открывания тиристора будет равен 1 . При Uу2 импульс будет сформирован в момент времени, соответствующий т.2, при =2 .
Кривая опорного напряжения должна быть расположена по отношению к анодному напряжению тиристора Uа,в,с так, чтобы при определённом напряжении управления обеспечить заданный угол управления , а значит и требуемое среднее выпрямленное напряжение преобразователя.
В рассмотренном случае опорное напряжение синхронизировано с напряжением сети, поэтому такие системы называются синхронными.
Требования к системам управления.
Минимально необходимая длительность управляющего импульса должна быть больше времени включения тиристора, которое составляет 520 мкс.
За время существования импульса ток в анодной цепи тиристора должен нарасти до тока удержания. Обычно применяются импульсы длительностью 8 10 (около 500 мкс).
Для максимального высокого быстродействия, присущего тиристорам, преобразования СИФУ выполняют практически безинерционными.