

28. Нагрузочные диаграммы электроприводов. Назначение, порядок построения.
Нагрузочная диаграмма ЭП характеризуется зависимость вращающего момента, тока или мощности, развиваемой двигателем, от времени. Нагрузочные диаграммы ЭП используются для оценки перегрузочной способности ЭП.
Нагрузочная диаграмма ЭП учитывает статические и динамические нагрузки, преодолеваемые ЭП, в течение цикла работы механизма.
Статические нагрузки определяются на основании технологических данных, характеризующих работу того или иного класса производственных машин, а динамические нагрузки оцениваются инерционными моментами, которые развиваются ЭП для обеспечения соответствующих угловых ускорений, обусловливающую заданную производительность механизмов.
Для построения нагрузочной диаграммы необходимо знать характер изменения моментов сопротивления и законы протекания переходных процессов в ЭП.
Построение нагрузочной диаграммы обязательно для окончательного выбора мощности двигателя т.к. только с помощью диаграммы можно выявить действительные условия его работы.
Пример построения диаграммы.
Допустим в соответствии с технологическим процессом задана диаграмма скорости:
Данному режиму изменения скорости соответствует график изменения ускорения:
Далее определяется статические моменты нагрузки приведенные к валу двигателя:
29. Реверсивное управление электродвигателями постоянного тока с использованием шип.
Регулирование напряжения на якоре ДПТ можно осуществить импульсным методом, тогда двигатель периодически подключается к источнику питания и отключается от него.
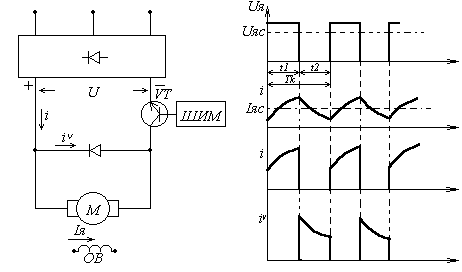
Схема включения ДПТ с независимым возбуждении при импульсном регулировании показана на рисунке 1.
( a ) ( б )
Рис.1 Схема включения двигателя постоянного тока с независимым возбуждением при импульсном регулировании напряжения ( а )
и диаграмма напряжения и токов ( б ).
Транзисторный ключ VT периодически подключает якорь двигателя к источнику нерегулируемого напряжения U. При этом в рабочую часть периода t1 энергия потребляется из сети и расходуется ЭД на полезную работу. Часть энергии запасается в виде электромагнитной энергии. Диод VD, шунтирующий якорную цепь двигателя, создаёт цепь для протекания тока якоря под действием ЭДС самоиндукции, которая возникает в индуктивности обмотки якоря в период разомкнутого состояния ключа (VT). Это создаёт условия для непрерывного протекания тока якоря, что существенно уменьшает его пульсации и устраняет коммутационные перенапряжения на ключе VT и в обмотке якоря.
Из всех известных видов импульсного регулирования угловой скорости получило распространение широтно-импульсное преобразование, при котором период коммутации Тк (частота) остается постоянным, а изменяется время t1 замкнутого состояния ключа VT - скважность:
![]() .
.
Среднее значение напряжения на якоре при ШИП равно Uя с = E U
где U – напряжение сети.
Уравнение механической характеристики для средних значений угловой скорости и момента имеет вид:
![]() .
.
Из уравнения следует, что угловую скорость можно регулировать в широких пределах, изменяя Е, а жесткость механической характеристики постоянна и равна жесткости естественной характеристики. Это является достоинством данного способа регулирования. Высокая жёсткость свойственна лишь в области непрерывного тока якоря. Если же в период выключенного состояния ключа ток в двигателе успевает снизится до нуля и в кривой тока содержится пауза, то имеет место режим прерывистых токов, где жесткость механических характеристик резко падает.
Основным средством сужения зоны прерывистых токов, соответственно уменьшения пульсаций тока якоря и угловой скорости является увеличения частоты коммутации ключа. Обычно частота коммутации составляет 800 – 1200 Гц.
Наряду с широтно-импульсным управлением, когда длительность замкнутого состояния ключа (t1=var) при неизменной длительности цикла (Tк=t1+ t2=const), а следовательно и частоте коммутации (fк=1/Tк=const).
Также используется частотно-импульсный метод управления, при котором длительность замкнутого состояния ключа t1=const, а изменяется частота, а следовательно, длительность цикла (Тк=var). Второй способ характеризуется простыми схемными решениями, но не позволяет осуществить глубокое регулирование угловой скорости, т.к. для Е 0 Тк , т.е. по существу вырождается идея импульсного регулирования с малой частотой переключения. Поэтому наиболее распространён способ ШИП, позволяющий изменять Е от 0 до 1.
Выражение для механических характеристик справедливо в пределах такого изменения вращающего момента, при котором ток якоря остаётся непрерывным. Если же в течение времени t2 ток успевает снизится до 0, то наступает режим прерывистого тока. В этом режиме механические характеристики теряют линейность и жёсткость.
Реверсивное управление двигателем
при импульсном методе.
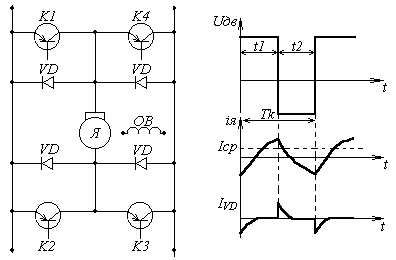
Реверсивное управление двигателем при импульсном методе можно осуществить по мостовой схеме ШИП, образованной 4 - я транзисторными ключами, к одной диаграмме которой подведено напряжение питающей сети, а к другой присоединён якорь двигателя.
( a ) ( б )
Рис.3 Реверсивная схема импульсного управления ( а )
и кривые поясняющие её работу ( б ).
Диоды служат для замыкания цепи якоря через источник напряжения в те отрезки времени, когда ток якоря течёт под действием ЭДС самоиндукции навстречу напряжению источника. Ключи работают одновременно, т.е. в интервале t1 замкнуты, например, ключи К1 ,К3 и на верхний зажим якоря подан (+), а в интервале времени t2 замкнуты ключи К2 , К4 и на верхний зажим подан (-) источника.
В
результате к двигателю подаётся
напряжение
![]() .
.
Считая Е=t1/Tk , и учитывая t2= Tk-t1 получим :
Uср=(2Е-1)U.
Следовательно механическая характеристика определяется выражением:
![]() .
.
Изменяя можно изменять не только значение, но и направление угловой скорости. При 1 0.5 угловая скорость х.х. положительна; при 0.5 0 она отрицательна.
Импульсное управление двигателем постоянного тока с помощью ШИП на транзисторных ключах ограничивается несколькими сотнями Ватт. Увеличение мощности может быть достигнуто за счёт применения в них ключей на транзисторах.