

11.3 I2с порт
Для обмена данными по I2С порту, который часто называется I2С шиной, используется всего два проводника (не считая корпуса).
В I2C шине приём и передача данных, а также передача адреса микросхемы и адреса регистра внутри микросхемы, к которому осуществляется обращение, производится по одному и тому же проводу. Для подключения к этому проводу используются микросхемы с открытым коллектором. Нагрузкой для всех микросхем, подключенных к линии SDA, служит внешний резистор.
Естественно, что скорость передачи данных по такому порту будет ниже, по сравнению с SPI портом. Тактовая синхронизация в I2C шине передаётся по линии SCL.
Начало работы с микросхемой обозначается особой комбинацией сигналов SDA и SCL, которая называется условием старта. Эта же комбинация одновременно осуществляет кадровую синхронизацию. Завершение работы с микросхемой обозначается ещё одной комбинацией сигналов SDA и SCL.
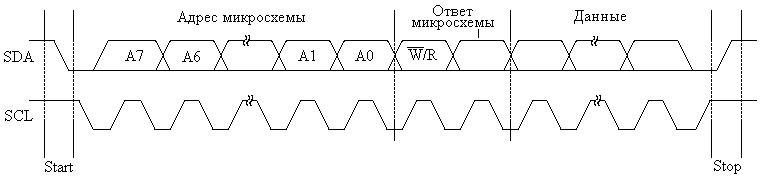
Рисунок 11.10 – Временная диаграмма I2C интерфейса
В качестве примера микросхем, использующих интерфейс I2C можно назвать микросхемы EEPROM серии 24сXX.
На этом можно завершить изучение синхронных последовательных портов. В качестве одного из наиболее распространённых цифровых устройств, использующего для настройки своего режима работы синхронный последовательный интерфейс SPI, рассмотрим синтезаторы частоты.
12 Синтезаторы частоты
В современных системах радиосвязи требуется формировать опорные колебания с различной частотой. При этом сталкиваются между собой требования обеспечения перестройки частоты формируемого колебания в достаточно широких пределах и стабильности его частоты. Стабильность частоты опорного колебания можно обеспечить при помощи генератора с кварцевой стабилизацией частоты, схема которого была рассмотрена ранее, однако при этом теряется возможность перестройки по заданному диапазону частот.
Можно реализовать перестраиваемый генератор, например, RC генератор с настройкой частоты резистором с переменным сопротивлением, или LC генератор с настройкой частоты колебательного контура варикапом, но при этом будет проблематично получить стабильность формируемых колебаний лучше 10‑2 для RC генератора и 10‑3 для LC генератора.
Из-за описанных проблем в случаях, когда требовалась высокая стабильность частоты, в течение определённого периода времени производилась аппаратура с генераторами кварц — частота. То есть в такой аппаратуре применялось столько кварцевых генераторов, сколько частотных каналов использовалось в этой аппаратуре.
В настоящее время удаётся объединить преимущества перестраиваемого генератора частоты и кварцевого генератора при помощи методов цифровой техники. Генераторы, способные осуществлять перестройку в широком диапазоне частот и при этом обладающие стабильностью кварцевых генераторов получили название синтезаторов частот.
Синтезаторы частоты не способны осуществлять плавную перестройку частоты. Они могут формировать частоты только из определённого набора значений. Однако шаг перестройки частоты синтезатора может быть сделан сколь угодно малым.
Не следует ограничивать область применения синтезаторов частот только устройствами передачи или приема сигналов. Внутри достаточно большого числа цифровых микросхем используются частоты синхронизации, в несколько раз превышающие частоту опорного колебания, поступающего на их тактовый вход. Синтезаторы частоты внутри этих микросхем используются для увеличения частоты входного колебания.
При использовании для формирования тактовой частоты синтезаторов частот, в ряде случаев полезным свойством является возможность программно изменять скорость работы микросхемы. Это может приводить к существенной экономии потребляемого микросхемой тока или снижать уровень помех, производимых данной микросхемой.
При таком использовании синтезатора частот обычно достаточно всего нескольких ступеней регулировки внутренней тактовой частоты микросхемы. В качестве наиболее распространенного примера подобной микросхемы можно привести центральный процессор персонального компьютера, где при помощи программы BIOS можно изменять скорость его работы.
Первоначально синтезаторы частот выполнялись на основе генераторов гармоник. Современные цифровые синтезаторы частот обычно строятся с использованием схемы автоматической подстройки частоты.
Систему автоматической подстройки частоты в простейшем случае можно рассматривать как систему с отрицательной обратной связью, обладающую коэффициентом усиления в прямом направлении G(s) и коэффициентом передачи цепи обратной связи H(s). Структурная схема системы, охваченной отрицательной обратной связью по напряжению приведена на рисунке 12.1.
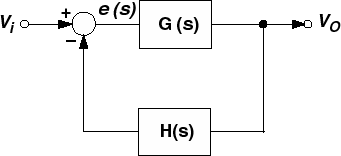
Рисунок 12.1 – Модель управляющей системы, охваченной
отрицательной обратной связью
Передаточная функция системы, охваченной цепью отрицательной обратной связи, обычно записывается в виде следующего выражения:
![]() ,
,
где GОС — петлевой коэффициент передачи цепи обратной связи;
G(s) — коэффициент усиления в прямом направлении;
H(s) — коэффициент передачи цепи обратной связи.
S = j = j2f, где j – мнимая единица, а — круговая частота.
Сигнал ошибки формирования частоты e(s) в этой схеме может формироваться как частотным, так и фазовым детектором. Может возникнуть вопрос — при чем тут фазовый детектор, если мы собрались строить схему автоматической подстройки частоты?
Для этого давайте вспомним, что мы называем частотой. По определению, частотой называется количество колебаний, вырабатываемое генератором в единицу времени (обычно в секунду). Теперь вспомним, как определить период колебания. Для этого необходимо определить в форме колебания одинаковое значение, которое называется фазой колебания.
Теперь частоту можно определить по формуле:
![]()
Это означает, что частота и фаза однозначно связаны между собой через операцию дифференцирования для частоты или операцию интегрирования для фазы. То есть для подстройки частоты генератора можно использовать как сигнал ошибки по частоте, так и сигнал ошибки по фазе.
Рассмотрим оба варианта формирования сигнала ошибки. Сначала рассмотрим вариант использования частотного детектора. При использовании частотного детектора сигнал ошибки будет пропорционален частоте, а это означает, что для настройки генератора управляемого напряжением на нужную нам частоту принципиально потребуется ошибка по частоте. Эту ошибку можно уменьшить за счет увеличения петлевого коэффициента передачи обратной связи, однако свести ее к нулю принципиально нельзя. Более того, эта ошибка будет зависеть от частоты настройки синтезатора, ведь только так можно обеспечить изменение напряжения на входе генератора управляемого напряжением при смене рабочей частоты.
Теперь рассмотрим вариант использования фазового детектора. В этом случае напряжение на выходе детектора будет зависеть от разности фаз опорного и формируемого колебаний. При различии частот опорного и формируемого колебаний, разность фаз будет постоянно изменяться от 0 до 360.
Вместе с разностью фаз с течением времени будет меняться и напряжение на входе генератора управляемого напряжением, а это означает, что рано или поздно частоты сравниваемых колебаний сравняются, и разность фаз больше не будет изменяться.
В схеме с подстройкой фазы выходного колебания напряжение на выходе фазового детектора будет изменяться при изменении частоты настройки синтезатора, то есть будет меняться их разность фаз, однако ошибка по частоте при этом будет равна нулю. Именно поэтому современные синтезаторы частот строятся на базе цепей фазовой подстройки частоты. Другие схемы в настоящее время практически не используются. Поэтому остановимся на схеме фазовой подстройки частоты подробнее.