

12. Управление процессами (объектами) с помощью эвм и введение в проблему оптимизации
12.1. Управление и ЭВМ
Управление процессами с помощью электронно-вычислительных машин (ЭВМ) является гибридной отраслью техники. В число дисциплин, составляющих ее основу, входят измерительная техника, теория автоматического регулирования и управления, устройство вычислительных машин, программирование, статистика, исследование операций, математическая теория оптимизации и др.
В самостоятельную отрасль техники управление процессами с помощью ЭВМ выделилось к концу 50-х годов XX в. (1958-1960 гг.). В теории этой отрасли следует подчеркнуть особую значимость двух составляющих ее областей: моделирования (т. е. описания) автоматизированных процессов и оптимального управления для достижения определенных эксплуатационных и экономических показателей. В отличие от этого, с помощью обычного управления - автоматического peгулирования, использующего регуляторы и КИП (контрольно-измерительные приборы) - можно регулировать преимущественно отдельные переменные величины процесса для устойчивой и точной их настройки в диапазоне рабочих режимов.
Функции управления с помощью ЭВМ значительно сложнее и разнообразнее: Iнапример, система может выполнять слежение за данными и их обработку, идентификацию, операции пуска и останова оборудования, оптимальное управление и адаптацию системы к внешним возмущениям.
К достоинствам управления с помощью ЭВМ относятся:
централизация автоматического регулирования переменных процесса;
быстрота вычислений;
способность к накоплению данных;
возможность выполнения регистрации и обработки данных экономно и эффективно;
возможность осуществления оптимального управления процессом в целом;
способность подготовки и принятия решений.
Одна из основных функций управления с помощью ЭВМ - оптимальное управление. Это шаг вперед по сравнению с непосредственным и программным управлением. Управление процессом осуществляется таким образом, чтобы снизить до минимума его продолжительность и затраты или обеспечить наилучшее качество выпускаемой продукции.
 Исполнительный
орган
Исполнительный
орган
Входы
Выходы
Эталонные значения
Требуемые режимы
работы(параметры)
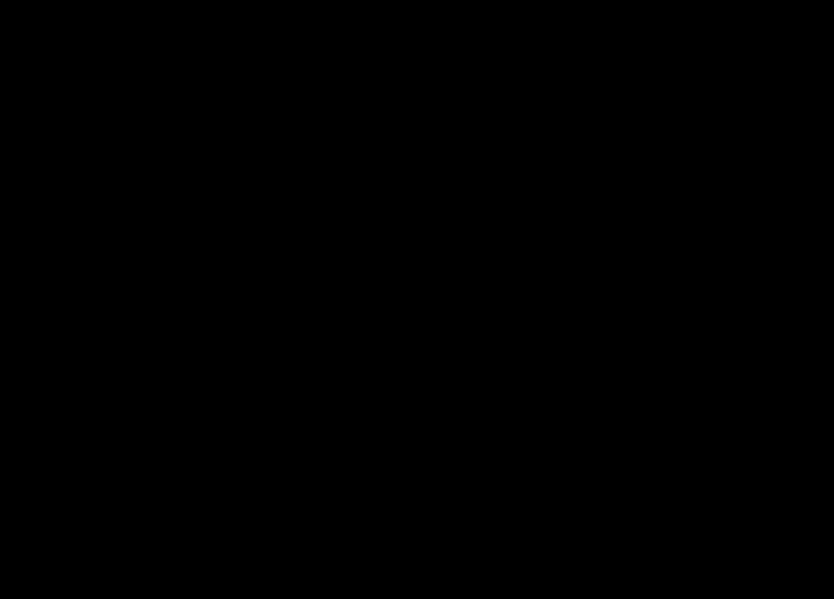
Рис. 31. Система оптимального управления
На рис. 31 приведена возможная функциональная схема системы оптимального управления. Возможны два варианта получения этой схемы:
первый – создается математическая модель физического процесса, на ЭВМ решаются уравнения оптимального управления, определяются эталонные значения переменных процесса, требуемые для оптимизации целевой функции(блоки1, 2, 3);
второй - в предыдущей схеме добавляется контур адаптации модели к
изменениям в характеристиках процесса (блок 4).
12.2. Введение в проблему оптимизации
Основными этапами решения задачи оптимизации являются:
построение модели физического процесса;
выбор целевой функции;
составление неравенств ограничений на переменные состояния и управления.
12.2.1. Назначение модели физического процесса при оптимизации
Модель физического процесса является математическим способом изображения исследуемого физического процесса. В моделях физического процесса возможны неточности, даже в тех случаях, когда предположения, применяемые для их разработок, обоснованы. Решение задачи оптимизации зависит от точности модели, при этом она не должна быть сложной, а должна служить только поставленной цели.
Назначение моделей физических процессов в проблеме оптимизации состоит в установлении связей между переменными состояния и переменными управления. Следует отметить, что всегда оптимизируется целевая функция, а не модель физических процессов сама по себе. Целевая функция и ограничения обычно зависят как от переменных состояния, так и от переменных управления. В некоторых случаях производится прямая подстановка модели физического процесса в выражение для целевой функции и ограничений, в результате чего последние становятся функциями только переменных управления. В других случаях можно изменить целевую функцию, добавив модель физического процесса, умноженную на множитель Лагранжа. В этом случае модель физического процесса можно рассматривать как ограничение, наложенное на переменные.
Наиболее простой и удобной формой модели физических процессов в статике является линейная алгебраическая модель. Ее строят методами регрессионного анализа.
Модель физических процессов в форме многочлена второго порядка может обеспечить лучшие результаты при исследовании нелинейных процессов.
Линейные алгебраические модели физических процессов в приращениях устанавливают зависимость между изменениями переменных состояния и переменных управления.
Для плохо определяемых процессов при отсутствии модели физического процесса применяется эволюционный метод, с помощью которого целевая функция оптимизируется путем непосредственного экспериментирования над процессом.
Динамические модели физических процессов представляют в виде дифференциальных или разностных уравнений, в качестве аргументов которых выступают переменные состояния и управления, а также время.
12.2.2. Целевая функция
Целевая функция является математическим выражением результата действия процесса. Ее также называют критериальной функцией, или показателем (критерием) качества. Выбор целевой функции и нахождение ее максимального или минимального значения есть суть проблемы оптимизации.
В отличие от моделей физических процессов целевые функции часто выражают нефизические величины, такие, например, как прибыль, стоимость, качество и т. п.
Перечислим основные принципы определения целевых функций, сформулированные на основе опыта.
1. Принцип однозначности. Состоит в том, что минимизируется или максимизируется только одна целевая функция. Если должны оптимизироваться две целевые функции Р и W, то их можно объединить в одну целевую функцию посредством линейной комбинации с весовыми коэффициентами Ψ1 и Ψ2 :
![]() (12.1)
(12.1)
2. Принцип соответствия. Заключается в том, что характер целевой функции и масштабные (весовые) коэффициенты определяются таким образом, что оптимизация целевой функции обеспечивает наиболее успешное управление процессом.
3. Принцип управляемости. Целевая функция выражается через переменные управления, которые контролируются оператором или системой вычислительных устройств. Целевые функции, которые выражаются через переменные, не являющиеся переменными управления процессов, бесполезны.
4. Принцип ориентации на прибыль, стоимость, качество.
5. Принцип подходящей формы. Желательно пользоваться целевой функцией, имеющей экстремум. Для целевых функций, не имеющих экстремума, требуются ограничения для обеспечения решения, которое имело бы смысл. Такое встречается, например, в линейном программировании. К нежелательным формам целевой функции относятся функции с разрывами и локальными экстремумами, а также неоднозначные функции. Одной из наиболее предпочтительных форм целевой функции является квадратичная форма.
6. Процесс оптимизации должен сводиться к решению уравнений, которые можно использовать для нахождения переменных управления, оптимизирующих целевую функцию. Уравнения, которые выражают переменные Ui (t) оптимального управления через требуемые переменные состояния, называются уравнениями оптимального управления. Отметим наиболее распространенные виды целевой функции.
1. Целевая функция прибыли. Это может быть разница между общим приходом денежных средств и затратами; разница между ценой объема выпуска и стоимостью объема исходных материалов.
2. Целевая функция стоимости. Выражает стоимость, связанную с осуществлением процесса. Обычно в нее включают лишь те переменные стоимости, которые поддаются управлению, например, стоимость материалов или топлива.
3. Целевая функция качества. Наиболее полезной и удобной формой целевой функции качества является взвешенная квадратичная форма. Такая форма определяет оптимальное протекание процесса как состояние, при котором сумма квадратов разностей между требуемыми значениями переменных состояния Xi тр и фактическими их значениями Xi минимальна. Переменные состояния могут быть либо измерены, либо вычислены косвенным путем.
4. Целевая функция времени. Выражает время протекания процесса между двумя фиксированными граничными условиями. Вид целевой функции:
 (12.2)
(12.2)
для граничных условий Xi(to)=Xio и Xi(tк)=Xiк
12.2.3. Ограничения на переменные состояния н переменные управления
Ограничения на переменные состояния и переменные управления либо oграничивают область допустимых значений переменных состояния и управления, либо устанавливают дополнительные зависимости между ними.
При оптимизации реальных физических процессов ограничения имеются всегда. В определенном смысле ограничения на переменные состояния и переменные управления можно считать расширением модели физического процесса.
Ограничения играют большую роль в процессе оптимизации. Например, линейная целевая функция, применяемая при линейном программировании, при отсутствии ограничений вообще не имеет экстремума. С другой стороны, ограничения на переменные управления обычно отрицательно сказываются на качестве оптимального процесса.
Рассмотрим некоторые виды ограничений.
Жесткие ограничения на переменные управления устанавливают верхние и нижние пределы для переменных управления. Нарушение жестких ограничений может привести к отрицательным последствиям или к решениям, не имеющим смысла. Примерами могут служить значения переменных, выходящие за пределы ограничений по безопасности, или отрицательные значения для физических переменных.
Нежесткие ограничения на переменные управления не запрещают превышения пределов ограничений. Однако качество процесса будет быстро ухудшаться, если предел ограничения превышается на значительную величину. Нежесткие ограничения могут быть учтены косвенным путем, а именно изменением целевой функции (введением в нее дополнений).
Ограничения на переменные состояния и переменные управления, выраженные как функции переменных управления. Для этого может потребоваться подстановка уравнений модели физического процесса в уравнения для ограничений или изменений условий целевой функции с помощью метода множителей Лагранжа.
При оптимизации процессов, зависящих от времени (динамическая оптимизация), для переменных состояния задаются начальные и конечные условия. Целевая функция выражается в виде интеграла, и задача сводится к решению дифференциального уравнения Эйлера-Лагранжа, предназначенного для определения оптимальных значений переменных управления. Также применяются метод динамического программирования и принцип максимума.
12.3. Способы осуществления оптимального управления
Осуществление оптимального управления заключается в решении задачи оптимизации непосредственно в ходе управления физическими процессами. Перечислим некоторые схемы оптимального управления:
без обратной связи с применением модели физического процесса;
без обратной связи с применением улучшаемой модели физического процесса;
с обратной связью с применением модели физического процесса в приращениях;
с эволюционной оптимизацией, то есть с использованием процесса для проведения экспериментов в системе управления с целью определения самого большого положительного (или отрицательного) наклона целевой функции;
с эволюционной оптимизацией и использованием в системе управления модели физического процесса;
с обратной связью и использованием текущих переменных состояния;
с непосредственным применением уравнения Эйлера-Лагранжа;
с обратной связью или без нее при использовании динамического программирования.
На рис. 32 представлена схема оптимального управления с обратной связью.
Переменные Переменные
Начальные и оптималь. состояния
конечн. условия управления xj(t)
Нахождение
переменных
оптимального
управления
Физический
процесс
Модель
физического
процесса
Разработка
вычислительной процедуры для поиска
ui(t)
Целевая
функция





 Ui(t)
Ui(t)
 В
системе
В
системе
 управления
управления
Вне системы
управления
Ограни-чения
Рис. 32. Система оптимального управления с обратной связью
Для расчета переменных оптимального управления ui(t) в решении уравнений управления для каждого промежутка времени в качестве начальных условий используются измеряемые и заданные переменные состояния xj(t). Значение xj(t) учитывает неточности модели физического процесса и влияние неконтролируемых переменных в каждый момент времени. Решение уравнения оптимального управления производится в системе управления, а разработка схемы вычислений - вне ее.