

10. Требования к системам управления
Применимость систем автоматического управления в каждом конкретном случае зависит от того, насколько система удовлетворяет предъявляемым к ней требованиям. Задача проектирования системы управления заключается в том, чтобы найти разумный компромисс между использованием простых технических средств и стремлением получить высокое качество работы.
Требования, предъявляемые к поведению системы в динамике, зависят от ее назначения, характера и условий работы и т. д. Основным требованием является сохранение заданной функциональной зависимости между управляющими и регулируемыми переменными на входе и выходе системы.
Различают следующие категории требований:
- к запасу устойчивости системы,
- к величине ошибки в установившемся состоянии или к статической точности,
- к поведению системы в переходном процессе (эти требования называются условиями качества),
- к динамической точности системы, т. е. к величине ошибки при непрерывно изменяющихся воздействиях.
Наиболее важным и необходимым требованием является устойчивость работы системы.
Из-за наличия обратных связей системы автоматического управления склонны к колебаниям. Однако устойчивость системы не должна нарушаться во время ее работы при изменении в определенных пределах внешних и внутренних условий (температуры окружающей среды, напряжения сети питания и т. п.).
Требование устойчивости является необходимым, но не достаточным условием для характеристики динамических свойств СУ. Динамическое поведение системы зависит от выполнения и других требований, которые, в свою очередь, определяются величиной и характером воздействий на систему.
Обычно при анализе и синтезе систем автоматического управления выбирают наиболее типичные воздействия. На рис. 25 представлены некоторые из них:
а) - единичное ступенчатое воздействие (сброс и увеличение нагрузки);
б) - воздействие в виде δ-функции (импульс произвольной формы и весьма малой продолжительности);
в) - воздействие при постоянной скорости и постоянном ускорении;
г) - g(t)=arctg(βt) управляющее воздействие радиолокационной станции.
g(t)
1(t) t
g(t)
t
g(t)
g2=t2/2
g1=t t
g(t)
t










а) б)




в) г)
Рис. 25. Виды входных воздействий
Любые воздействия вызывают в системе переходный процесс, по окончании которого система переходит в новое установившееся состояние.
На рис. 26 представлены основные типы переходных процессов при ступенчатом входном воздействии.
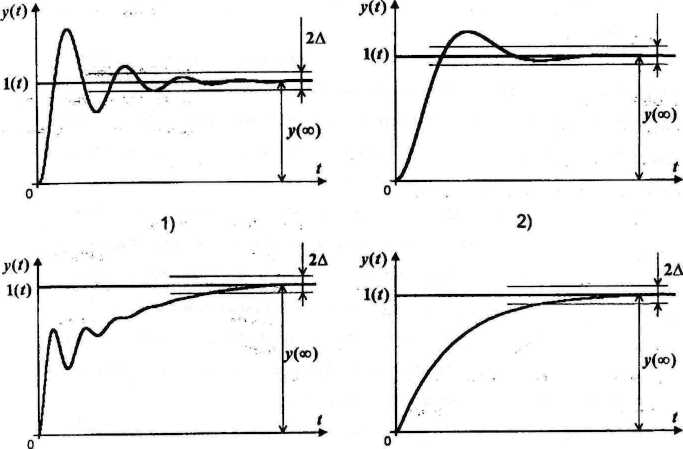
Рис. 26. Основные типы переходных процессов
1 - колебательный процесс (два и более периодов перерегулирования);
2 - малоколебательный процесс (одно перерегулирование);
3 - процесс без перерегулирования, y(t) ≤ y(∞);
4
-
монотонный процесс, скорость
![]() в течение всего переходного процесса
и
в течение всего переходного процесса
и
![]() при t
> tперех.пр.
, где ∆- абсолютная ошибка.
при t
> tперех.пр.
, где ∆- абсолютная ошибка.
Наряду с указанными выше требованиями системы управления должны также удовлетворять требованиям, связанным с их эксплуатацией, и экономическим требованиям.