

Лаба 6
.odtМИНОБРНАУКИ РОССИИ
Санкт-Петербургский государственный
электротехнический университет
«ЛЭТИ» им. В.И. Ульянова (Ленина)
Кафедра информационно-измерительных систем и технологий
отчет
по лабораторной работе №6
по дисциплине «Метрология»
Тема: «Динамический режим средств измерений»
|
Студенты гр. 7894 |
|
Жмаева С.М. Козелов В.Б. |
|
Преподаватель |
|
Варшавский И.Е. |
Санкт-Петербург
2019
Цель работы: Изучение динамического режима средств измерений.
Метрологическая характеристика используемых приборов:
|
Наименование, тип, модель |
Единицы измерений |
Инструментальная погрешность |
|
Осцилогр. универс. GOS-620 |
0,5 мс/дел, 0,2 мс/дел |
3% |
|
Вольтметры на стенде |
0,01 В |
? |
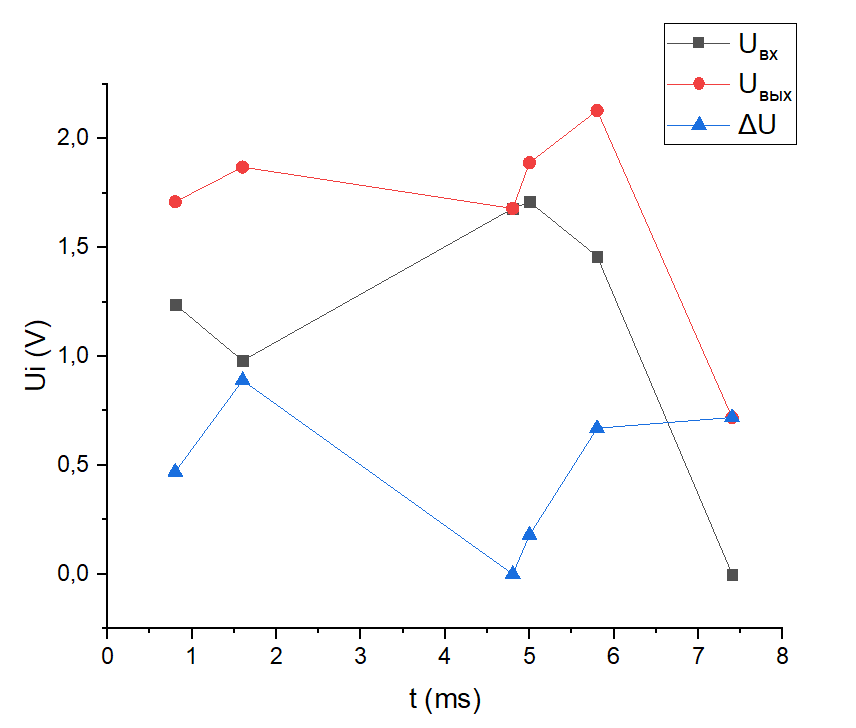
Определение динамической погрешности при ступенчатом режиме:
|
β=0,3 |
f=0,8 кГц |
t, мс |
0,8 |
1,6 |
4,8 |
5,0 |
5,8 |
7,4 |
|
uвх, В |
1,24 |
0,98 |
1,68 |
1,71 |
1,46 |
0,00 |
||
|
uвых, В |
1,71 |
1,87 |
1,68 |
1,89 |
2,13 |
0,72 |
||
|
Δu, В |
0,47 |
0,89 |
0 |
0,18 |
0,67 |
0,72 |
||
|
f=0,4 кГц |
t, мс |
1,0 |
2,0 |
3,6 |
5,2 |
6,0 |
8,2 |
|
|
uвх, В |
1,24 |
0,66 |
0,98 |
1,71 |
1,34 |
0,27 |
||
|
uвых, В |
0,80 |
0,66 |
1,77 |
0,60 |
0,52 |
2,09 |
||
|
Δu, В |
0,44 |
0 |
0,79 |
1,11 |
0,82 |
1,82 |
||
|
β=0,7 |
f=0,4 кГц |
t, мс |
1,0 |
2,4 |
3,4 |
5,3 |
6,0 |
7,6 |
|
uвх, В |
1,25 |
0,51 |
0,62 |
1,70 |
1,41 |
0,19 |
||
|
uвых, В |
0,32 |
0,51 |
0,75 |
0,04 |
0,53 |
0,98 |
||
|
Δu, В |
0,93 |
0 |
0,13 |
1,66 |
0,88 |
0,79 |
||
|
f=0,8 кГц |
t, мс |
0,8 |
1,4 |
2,2 |
4,3 |
5,2 |
6,5 |
|
|
uвх, В |
1,24 |
1,12 |
0,58 |
1,41 |
1,71 |
0,96 |
||
|
uвых, В |
0,83 |
1,12 |
1,29 |
0,21 |
1,01 |
1,51 |
||
|
Δu, В |
0,41 |
0 |
0,71 |
0,80 |
0,70 |
0,55 |
 График
1: Коэффициент затухания 0,3, частота
0,4 кГц
График
1: Коэффициент затухания 0,3, частота
0,4 кГц
 График
2: Коэффициент затухания 0,3, частота 0,8
кГц
График
2: Коэффициент затухания 0,3, частота 0,8
кГц
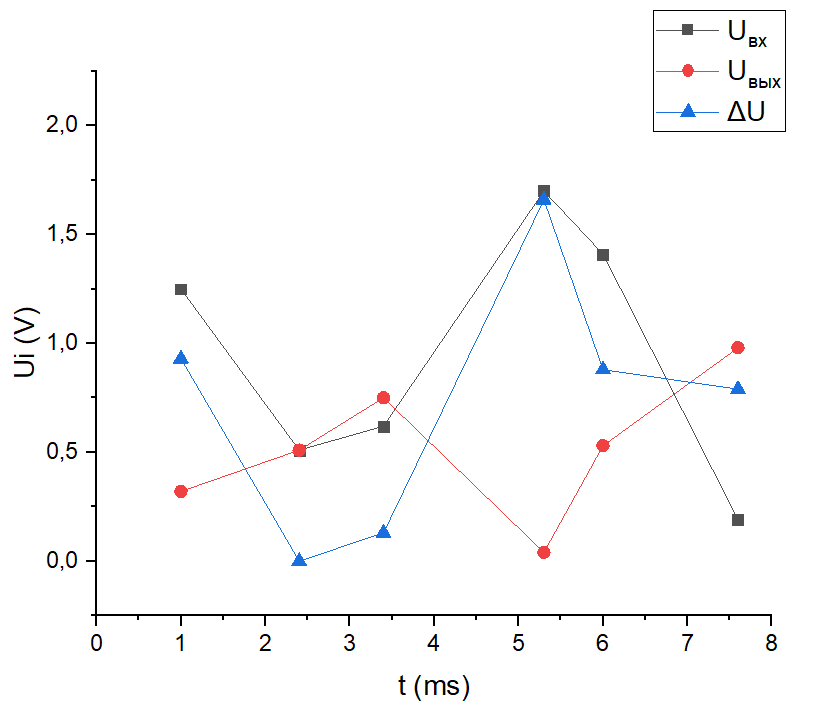 График
3: Коэффициент затухания 0,7, частота
0,4 кГц
График
3: Коэффициент затухания 0,7, частота
0,4 кГц График
4: Коэффициент затухания 0,7, частота 0,8
кГц
График
4: Коэффициент затухания 0,7, частота 0,8
кГц
Синусоидальный режим:
|
β=0,3 |
f=0,4 кГц |
t, мс |
0,0 |
3,0 |
5,0 |
8,7 |
10,5 |
13,0 |
15,5 |
|
uвх, В |
1,16 |
1,17 |
1,16 |
1,16 |
1,16 |
1,16 |
1,16 |
||
|
uвых, В |
1,49 |
1,17 |
2,23 |
1,16 |
0,86 |
1,16 |
1,35 |
||
|
f=0,8 кГц |
t, мс |
0,0 |
1,5 |
2,6 |
4,4 |
5,4 |
6,8 |
7,8 |
|
|
uвх, В |
1,20 |
1,16 |
1,16 |
1,16 |
1,16 |
1,16 |
1,16 |
||
|
uвых, В |
1,47 |
1,16 |
2,23 |
1,16 |
0,84 |
1,16 |
1,35 |
||
|
β=0,7 |
f=0,4 кГц |
t, мс |
0,0 |
4,5 |
7,0 |
Измерения в первом случае производились на коэффициенте осциллографа 0,5 мс/дел, в остальных случаях 0,2 мс/дел |
|||
|
uвх, В |
1,16 |
1,16 |
1,16 |
||||||
|
uвых, В |
1,51 |
1,16 |
1,34 |
||||||
|
f=0,8 кГц |
t, мс |
0,0 |
1,6 |
3,5 |
|||||
|
uвх, В |
1,16 |
1,16 |
1,14 |
||||||
|
uвых, В |
1,41 |
1,16 |
1,34 |
||||||
 График
5: Коэффициент
затухания 0,3, частота 0,4 кГц
График
5: Коэффициент
затухания 0,3, частота 0,4 кГц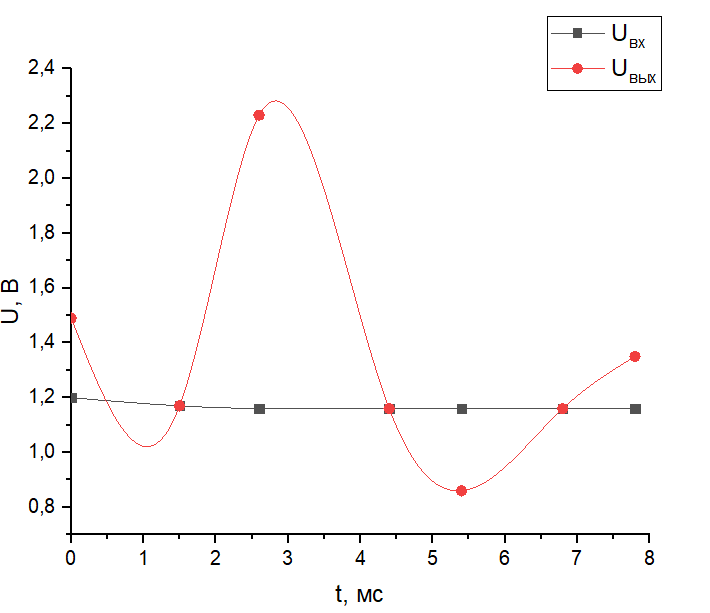 График
6: Коэффициент затухания 0,3, частота 0,8
кГц
График
6: Коэффициент затухания 0,3, частота 0,8
кГц
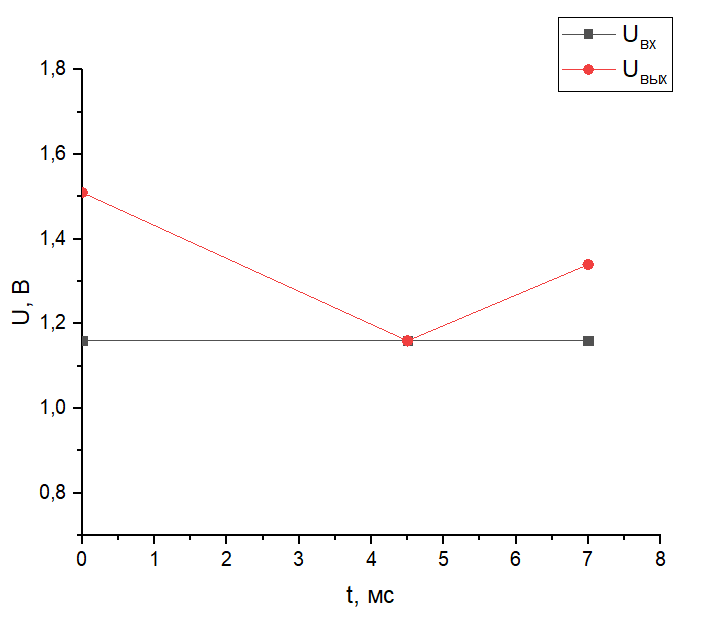 График
7: Коэффициент затухания 0,7, частота 0,4
кГц
График
7: Коэффициент затухания 0,7, частота 0,4
кГц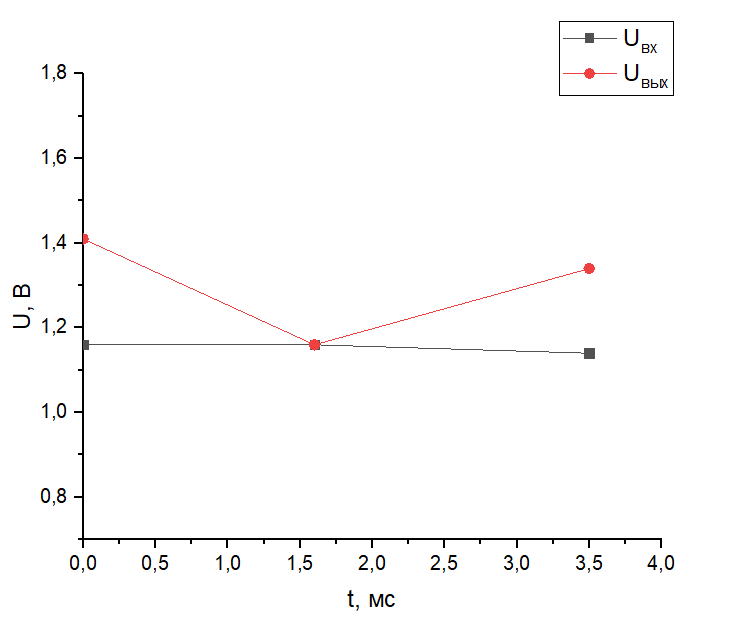 График
8: Коэффициент затухания
0,7, частота 0,8 кГц
График
8: Коэффициент затухания
0,7, частота 0,8 кГц
 Вывод:
Как можно видеть из полученных
графиков, изменение коэффициента
демпфирования слабо влияет на получаемую
динамическую погрешность, напротив же
изменение частоты уменьшает динамическую
погрешность в среднем по закону обратной
пропорциональности.
Вывод:
Как можно видеть из полученных
графиков, изменение коэффициента
демпфирования слабо влияет на получаемую
динамическую погрешность, напротив же
изменение частоты уменьшает динамическую
погрешность в среднем по закону обратной
пропорциональности.
Время установления уменьшается при увеличении частоты сигнала или коэффициента демпфирования.