

1) Метод симметрии.
Покажем, что если однородное тело имеет плоскость, ось или центр материальной симметрии, то его центр тяжести находится соответственно в плоскости, на оси или в центре симметрии.
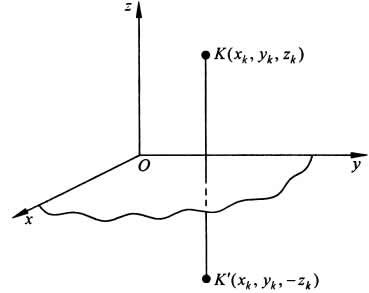
а. Пусть тело симметрично относительно плоскости Оху
Тогда
вследствие симметрии каждому элементу
К тела объемом ![]() (
(![]() ,
, ![]() ,
, ![]() )
будет соответствовать элемент К' того
же объема с координатами (
,
,-
).
Поэтому статический момент объема
)
будет соответствовать элемент К' того
же объема с координатами (
,
,-
).
Поэтому статический момент объема  и
координата
и
координата 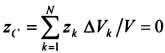 .
Следовательно, центр тяжести тела будет
лежать в плоскости симметрии Оху.
.
Следовательно, центр тяжести тела будет
лежать в плоскости симметрии Оху.
б. Пусть тело симметрично относительно оси Oz.
Тогда
всякому элементу К тела объемом
с
координатами (
,
,
)
будет соответствовать такой же по объему
элемент К', расположенный симметрично
относительно оси Oz и имеющий координаты
(-
,-
,
).
Поэтому статические моменты  и,
следовательно, координаты
и,
следовательно, координаты  .
Таким образом, центр тяжести будет
находится на оси симметрии.
.
Таким образом, центр тяжести будет
находится на оси симметрии.
в. Пусть
тело имеет центр симметрии, который
примем за начало координат. Тогда всякой
частице тела объемом
,
определяемой радиус-вектором rк, будет
соответствовать частица такого же
объема с радиус-вектором (-rк), симметричная
ей относительно центра О. Поэтому ![]() .
Следовательно, центр тяжести будет
находиться в центре симметрии. Например,
центры тяжести однородных куба, сферы,
кольца, прямоугольной
или круглой
пластины лежат в геометрическом центре
этих тел.
.
Следовательно, центр тяжести будет
находиться в центре симметрии. Например,
центры тяжести однородных куба, сферы,
кольца, прямоугольной
или круглой
пластины лежат в геометрическом центре
этих тел.
2) Метод разбиения.
Этот
метод основан на применении формул  и
и  .
Его используют, когда тело можно разбить
на ряд частей, центры тяжести которых
известны из условий симметрии. Метод
разбиения можно наглядно проиллюстрировать
с помощью рисунка.
.
Его используют, когда тело можно разбить
на ряд частей, центры тяжести которых
известны из условий симметрии. Метод
разбиения можно наглядно проиллюстрировать
с помощью рисунка.
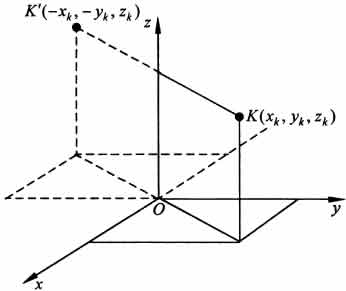
Расположив тело в системе координат, разделив его мысленно на отдельные части, веса которых Р1, Р2, Р3, Р4, а центры тяжести известны, вычислим вес тела и, согласно формулам , координаты центра тяжести С всего тела. Если тело имеет вырез, причем известны центр тяжести тела без выреза и центр тяжести вырезанного тела, то для определения координат центра тяжести используют метод отрицательных масс (частный случай метода разбиения).

На
рисунке изображена квадратная пластина,
сторона которой а. В пластине выполнено
круглое отверстие с радиусом r=0,2а и
координатами центра x2=-0,3а; у2=0. Координаты
центра тяжести С, пластины без отверстия
x1=0, у1=0. Рассмотрим два тела: пластину
без отверстия и диск, соответствующий
вырезанному отверстию. При использовании
формул
вес
диска будем считать отрицательным.
Тогда ,
где р — вес единицы площади пластины.
,
где р — вес единицы площади пластины.
3) Метод интегрирования.
Когда тело нельзя разбить на составные части, центры тяжести которых известны, используют метод интегрирования, являющийся универсальным.
Пример Условие задачи
Найти координаты центра тяжести тела, имеющего вид стула, состоящего из стержней одинаковой длины и веса. Длина стержня равна 44 см.
Решение задачи

79. Принцип возможных перемещений. Обобщенные координаты системы. Дифференциальные уравнения движения механической системы в обобщенных координатах или уравнения Лагранжа второго рода.
Рассмотрим
механическую систему точек
.
В общем случае уравнения связей,
наложенных на механическую систему
имеют вид
 ,
которое далее будем записывать в виде
,
которое далее будем записывать в виде
 (1)
(1)
или неравенство
 (2)
(2)
Классификация связей проводится по следующим признакам:
Связи удерживающие или двусторонние. Задаются уравнениями (1)
Связи неудерживающие или односторонние. Задаются неравенствами (2)
Стационарные связи – это связи, в уравнениях или неравенствах которых функция f не зависит явно от времени. В противном случае – не стационарные.
Голономные связи (геометрические, интегрируемые) – связи, в уравнениях или неравенствах которых функция f не зависит явно от скоростей точек. В противном случае – не голономные.
Идеальные и неидеальные.
Возможные перемещения частиц механической системы – это мысленные бесконечно малые перемещения, допускаемые связями.
Принцип
возможных перемещений —
один из вариационных
принципов в теоретической
механике, устанавливающий общее
условие равновесия механической
системы. Согласно этому принципу для
равновесия механической системы
с идеальными
связями необходимо и достаточно,
чтобы сумма работ ![]() всех
приложенных к системе активных сил на
любом возможном перемещении системы
была равна нулю.
всех
приложенных к системе активных сил на
любом возможном перемещении системы
была равна нулю.
Количество уравнений, которые можно составить для механической системы, исходя из принципа возможных перемещений, равно количеству степеней свободы этой самой механической системы.
Обобщенные координаты – независимые между собой скалярные величины q1,q2,…,qS, которые однозначно определяют положение материального объекта в данной системе отсчета в любой момент времени.
Дифференциальные уравнения движения механической системы в обобщенных координатах или уравнения Лагранжа второго рода
Пусть механическая система имеет S степеней свободы. Введем обобщенные координаты q1,q2,…,qS.
Если величины q1,q2,…,qS являются обобщенными координатами и связи, наложенные на механическую систему, голономные и стационарные, тогда координаты любой частицы механической системы являются функциями обобщенных координат

Тогда виртуальные перемещения:

Сумма элементарных работ сил, действующих на механическую систему на некотором виртуальном перемещении:

 – обобщенная сила,
соответствующая обобщенной координате
qj
– обобщенная сила,
соответствующая обобщенной координате
qj
 (*) при равновесии
механической системы.
(*) при равновесии
механической системы.
С другой стороны так как обобщенные координаты qj являются независимыми величинами, то их вариации δqj также являются независимыми. Следовательно условие (*) будет выполняться только в том случае, когда все обобщенные силы равны нулю


Из принципа Даламбера-Лагранжа

можно вывести динамические уравнения движения механической системы в обобщенных координатах – Уравнение Лагранжа второго рода

