

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Российской Федерации
ТОЛЬЯТТИНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Кафедра «Управление промышленной и экологической безопасностью»
Д.Г. ЛЕВАШКИН, А.В. ГРИЩЕНКО
СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ
УЧЕБНО-МЕТОДИЧЕСКОЕ ПОСОБИЕ
для студентов технических специальностей вузов
Тольятти, ТГУ 2009
УДК 658.382
ББК 32.965
Л 35
Левашкин Д.Г., Грищенко А.В. Системы автоматического контроля: Лабораторный практикум для студентов технических специальностей вузов. – Тольятти.: Тольяттинский государственный университет, 2009 – 60 с.
В данном учебном пособии приведен комплекс лабораторно-практических работ по дисциплине «Системы автоматического контроля» с блоком самоконтроля, заданиями и указаниями для выполнения самостоятельной работы.
Учебное пособие предназначено для студентов специальности «Безопасность технологических процессов и производств» всех форм обучения по дисциплине «Системы автоматического контроля».
Рецензент: к.т.н., доцент Тольяттинского государственного университета В.И.Малышев
Рекомендовано к изданию методической комиссией автомеханического института Тольяттинского государственного университета.
© Д.Г. Левашкин, А.В.Грищенко
© Тольяттинский государственный университет, 2009
Содержание
ЛАБОРАТОРНАЯ РАБОТА №1 4
Изучение напряженно-деформированного состояния инженерных конструкций 4
ЛАБОРАТОРНАЯ РАБОТА №2 9
Расчет параметров магнитного датчика 9
ЛАБОРАТОРНАЯ РАБОТА №3 14
Электростатические актюаторы систем контроля 14
ЛАБОРАТОРНАЯ РАБОТА №4 18
Изучение конструктивных параметров микропривода устройств автоматического контроля 18
ЛАБОРАТОРНАЯ РАБОТА №5 24
Тепловые исполнительные микроустройства систем контроля 24
ЛАБОРАТОРНАЯ РАБОТА №6 28
Волоконно-оптические датчики контроля напряженности магнитного поля и силы тока 28
ЛАБОРАТОРНАЯ РАБОТА № 7 35
Оценка рабочих параметров пьезоэлектрических микроактюаторов 35
ЛАБОРАТОРНАЯ РАБОТА № 8 43
Расчет электромеханических устройств систем контроля 43
ЛАБОРАТОРНАЯ РАБОТА № 9 48
Расчет функционального датчика 48
Методические указания 57
по выполнению Контрольной работы 57
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 59
Лабораторная работа №1 Изучение напряженно-деформированного состояния инженерных конструкций
ЦЕЛЬ РАБОТЫ
Изучить методы автоматизированного контроля параметров нагруженного состояния инженерных конструкций.
СОДЕРЖАНИЕ РАБОТЫ
Ознакомится с работой системы автоматизированного контроля деформаций и напряжений.
Определить величину напряжений в исследуемой конструкции.
Определить величину деформаций исследуемой конструкции.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Датчики смещения могут измерять как линейный сдвиг (при поступательном движении), так и угол поворота (при вращении). Кроме того, их можно классифицировать в соответствии с используемым принципом преобразования. Например, можно провести различие между резистивными, емкостными, индуктивными и оптическими датчиками поступательного движения или вращения. Эти механические датчики называются также тензодатчиками или сенсорами.
В данном типе
резистивного датчика смещения используется
тот факт, что электрическое сопротивление
проводника зависит от размеров проводника.
![]() (электрическое сопротивление), где
(электрическое сопротивление), где
![]() (с
зависит от материала)
(с
зависит от материала)
|
Рис. 1.1. Тензодатчик с металлической фольгой |
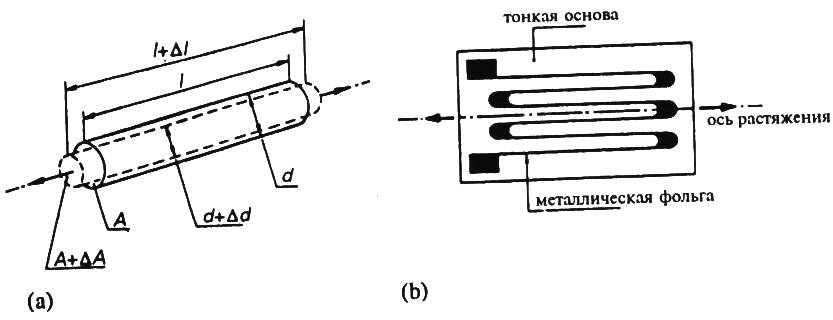
![]() (площадь
поперечного сечения)
(площадь
поперечного сечения)
![]() (μ
- постоянная Пуассона).
(μ
- постоянная Пуассона).
Получаем:
![]() . (1.1)
. (1.1)
Если при растяжении объем остается неизменным, то в соответствии с предпоследним выражением μ=0,5. Для многих материалов μ ≈ 0,3. Удельное сопротивление большинства металлов не зависит от растяжения; константа с очень мала. Следовательно, для большинства металлов эта чувствительность приблизительно равна 2, например, у нихрома 2,1 — 2,3, у константана 2,0 — 2,1, у хромеля 2,5; правда, у манганина 0,5, а у никеля -12.
Для металлических тензодатчиков получаем:
![]() (1.2)
(1.2)
где
![]() —
коэффициент
чувствительности тензодатчика.
Полупроводниковые материалы обычно
имеют значение величины k
много больше
2. Это
связано с тем фактом, что больше не
выполняется условие
—
коэффициент
чувствительности тензодатчика.
Полупроводниковые материалы обычно
имеют значение величины k
много больше
2. Это
связано с тем фактом, что больше не
выполняется условие
![]() .
В этих материалах доминирует
пьезорезистивный эффект.
.
В этих материалах доминирует
пьезорезистивный эффект.
Для измерения линейной деформации в механической конструкции тензодатчик приклеивают к этой конструкции в направлении ожидаемого воздействия. Так рисунок 1.2(б) иллюстрирует метод измерения изгиба консольной балки. Рисунок 3.2(в) отражает способ измерения скручивания вала с помощью четырех тензодатчиков, прикрепленных к валу под углом 45° к оси скручивания. Рисунок 1.2(г) изображает схему моста Уитстона для компенсации мешающих воздействий. Если тензодатчики R1, R2, R3 и R4 соединены так, как показано, то измерение линейной деформации (а) будет нечувствительно к температуре, измерение изгиба (б) — к растяжению и температуре, а измерение скручивания (в) — даже к растяжению, изгибу, температуре и температурному градиенту вдоль поверхности. В случаях (а) и (б) резисторы моста R2 и R3 являются постоянными резисторами, сопротивление которых выбирается из соображений максимальной чувствительности моста.
а) б)
в) г) |
Рис. 1.2. Измерение линейной деформации, изгиба и скручивания с компенсирующими тензодатчиками в мосте Уитстона. (а) Компенсация при измерении линейной деформации. (б) Компенсация при измерении изгиба, (в) Измерение крутящего момента, (г) Измерительный мост. |

В технике контроль техническими процессами выполняют цифровые вычислительные машины, работающие на основе передачи, обработки электрических импульсов. Большинство исполнительных механизмов систем контроля являются аналоговыми устройствами с амплитудным управлением. Дальнейшим развитием данного направления систем контроля является применение цифро-аналоговых преобразователей и микропроцессорных систем контроля. Это позволит снизить время обработки сигнала, позволит повысить производительность процессов контроля и точность выходных данных.
4. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
4.1. Ознакомьтесь с целью и содержанием работы.
4.2. Изучите теоретические сведения и конструкцию установки.
4.3. Получите задание у преподавателя (см. табл. 1.1).
Таблица 1.1
Данные |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
α (рад) |
5 |
10 |
12 |
15 |
7 |
17 |
21 |
24 |
26 |
28 |
m (кг) |
1,5 |
2,2 |
3 |
4 |
5 |
7,5 |
8,5 |
2,5 |
5,5 |
8 |
b (мм) |
10 |
20 |
25 |
28 |
30 |
33 |
35 |
40 |
45 |
55 |
h (мм) |
10 |
12 |
15 |
18 |
20 |
22 |
25 |
30 |
33 |
35 |
l (мм) |
50 |
75 |
100 |
85 |
110 |
115 |
125 |
135 |
140 |
150 |
σР (Па) |
70,8 |
60,5 |
52,5 |
80,5 |
45 |
55 |
55,7 |
47,8 |
55,9 |
60,5 |
Данные |
Варианты |
|||||||||
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
α (рад) |
6 |
11 |
13 |
16 |
18 |
19 |
22 |
25 |
27 |
30 |
m (кг) |
1 |
2 |
3 |
4 |
5 |
7,5 |
8,5 |
2,5 |
5,5 |
8 |
b (мм) |
11 |
23 |
27 |
29 |
32 |
34 |
36 |
43 |
46 |
57 |
h (мм) |
11 |
13 |
16 |
19 |
23 |
24 |
27 |
32 |
35 |
37 |
l (мм) |
55 |
77 |
112 |
87 |
114 |
118 |
127 |
138 |
145 |
155 |
σР (Па) |
70,8 |
60,5 |
52,5 |
80,5 |
45,1 |
55,1 |
55,7 |
47,8 |
55,9 |
60,5 |
4.4. Расчётным путём определите напряжение в тарировочной балке и вычислите коэффициент тарировки Кт.
4.6. Проведите нагружение исследуемой конструкции, фиксируйте показания приборов.
4.7. Рассчитайте величину напряжений. При этом используйте формулы:
![]() (1.3)
(1.3)
где Кт – коэффициент тарировки тензодатчика; σт – напряжение при тарировке тензодатчика; αт – угол отклонения стрелки индикатора; Мт – крутящий момент при тарировке; W – момент инерции; Р – действующая нагрузка; b, h, l – ширина, высота, длина исследуемой конструкции.
4.8. Рассчитайте величину деформаций. При этом используйте формулу:
![]() (1.4)
(1.4)
4.9. Результаты расчетов занесите в таблицу 1.2.
Таблица 1.2
-
№
P, кг
αизм, рад
σизм, Па
σр, Па

1
2
СОДЕРЖАНИЕ ОТЧЕТА
Отчет должен содержать:
Результаты проведенных расчетов.
Выводы по результатам проведенных расчетов
КОНТРОЛЬНЫЕ ВОПРОСЫ
Дайте определение коэффициента чувствительности тензодатчика.
Дайте определение пьезорезистивного эффекта.
Для чего определяется коэффициент тарировки тензодатчика.
Объясните взаимосвязь напряжений и упругих деформаций.
Обоснуйте необходимость тарировки тензодатчиков.
Приведите недостатки и преимущества мостовой схемы измерения.
Назовите методологические этапы тензометрического исследования.