

6 Лабораторна робота №6 « Дослідження електродвигунного механізму з сталою швидкістю» Мета, завдання і тривалість роботи.
МЕТА: Набути навиків роботи із електродвигунним механізмом зі сталою швидкістю.
ЗАВДАННЯ: Навчитися працювати із електродвигунними механізмами.
ТРИВАЛІСТЬ РОБОТИ: 2 академічні години.
Основні теоретичні положення
В автоматичних системах регулювання широке застосування в якості виконавчих механізмів знаходять електродвигуни з постійною частотою обертання вихідного вала.
Виконавчий механізм постійної швидкості може знаходитися тільки в трьох станах: переміщення РО з постійною швидкістю S, в стані нерухомості, переміщення РО в зворотній бік з постійною швидкістю.
Без врахування часу розгону і гальмування статична характеристика виконавчого механізму описується рівнянням (6.1) і представлений на рисунку 6.1а. А статична характеристика виконавчого механізму постійної швидкості в комплекті з електромагнітним пусковим пристроєм на рисунку 6.1 б.
![]() (6.1)
(6.1)
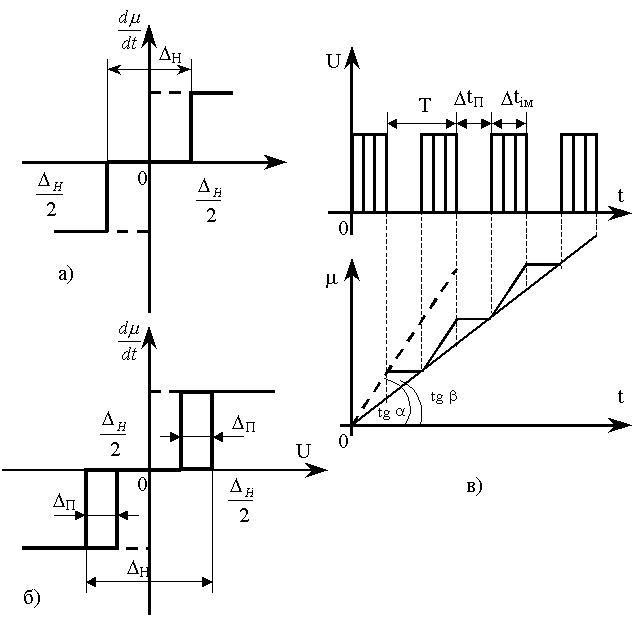
Рисунок 6.1 – Статичні характеристики ВМ постійної швидкості (а), постійної швидкості в комплекті з електромагнітним пусковим пристроєм (б) і характер переміщення ВМ постійної швидкості при надходженні на його вхід серії постійних імпульсів (в)
Аналітично статична характеристика запишеться у вигляді системи наступних рівнянь:
![]() (6.3)
(6.3)
де
![]() — зона нечутливості пускового пристрою;
d/dt
— швидкість переміщення
РО; U
— сигнал на вході пускового пристрою.
— зона нечутливості пускового пристрою;
d/dt
— швидкість переміщення
РО; U
— сигнал на вході пускового пристрою.
Як правило, функції пускових пристроїв використовують релейні електромагнітні апарати (магнітні пускачі, електромагнітні реле і т.п.).
Електромагнітні апарати спрацьовують при більшому, а відпускання відбувається при меншому значенні вхідного сигналу. Статична характеристика виконавчого пристрою при цьому зображена на рисунку 6.1, б. Зі статичної характеристики на рисунку 6.1,б видно, що електродвигун вмикається при вхідному сигналі | U | > н/2, а вимикається при
|U|< н/2-П,
де П — значення зони повернення чи зони неоднозначності релейного апарату.
Статична характеристика виконавчого механізму постійної швидкості є істотно нелінійною. Її не можна лінеаризувати з достатньою для практичних розрахунків точністю при різних діапазонах зміни вхідного сигналу U.
Проте такий виконавчий механізм може мати характеристики досить близькі до лінійних при релейно-імпульсній зміні вхідного сигналу.
Подамо на вхід виконавчого механізму з постійною частотою обертання імпульси напруги UH з періодом проходження Тпер і шпаровитістю
![]() (6.5)
(6.5)
де
![]() - період проходження імпульсів;
- період проходження імпульсів;
![]() — тривалість імпульсів;
— тривалість імпульсів;
![]() — тривалість пауз.
— тривалість пауз.
Під час надходження імпульсу виконавчий механізм (ВМ) буде переміщувати РО з постійною швидкістю d/dt=S=tg a (рисунку 6.1, в). Під час пауз ВМ буде нерухомий.
При надходженні на ВМ серії імпульсів характер його переміщення буде мати вигляд, представлений на рисунку. 6.1, в.
Середня швидкість переміщення РО буде рівною:
![]() (6.6)
(6.6)
або з врахуванням (6.5):
![]() (6.7)
(6.7)
Перетворивши (6.6) за Лапласом, отримаємо:
![]() (6.8)
(6.8)
Таким чином, за каналом шпаровитість проходження імпульсів – усереднене переміщення РО, виконавчий механізм постійної швидкості можна представити інтегруючою ланкою з передавальною функцією (6.8).