

Хід роботи
1. Здійснити перевірку кіл керування та сигналізації.
1.1. Встановити вручну затвір засувки в середнє положення;
1.2. Подати напругу в коло керування;
1.3. Повернути перемикач SA1 в положення "Д";
1.4. Натиснути кнопку SВ1 (відкрито), при цьому повинне спрацювати реле К2 і засвітитися лампа Л2;
1.5. Натиснути на кінцевий вимикач SQ1, при цьому реле К2 повинне відключитися, а лампа Л2 – погаснути;
1.6. Натиснути кнопку SВ2 (закрито), при цьому повинне спрацювати реле К3 і засвітитися лампа Л3;
1.7. Натиснути на кінцевий вимикач SQ2, при цьому реле К3 повинне відключитися, а лампа Л3 – погаснути;
1.8. Перевіряють відповідність напряму обертання вала електродвигуна необхідному.
Для цього необхідно:
а) встановити по шкалі вказівник затвору засувки в середнє положення;
б) подати напругу в коло керування і в силове коло;
в) натиснути кнопку SB1 (відкрито) і прослідкувати за стрілкою вказівника, якщо стрілка вказівника переміщується в сторону закриття, то необхідно зупинити привід, а в силовому колі керування перекинути місцями контакти пускових реле;
2. Визначити час розгону при переміщенні штоку на 10%, 20%, 30%, 40%, 50% і за даними побудувати залежність часу розгону від переміщення штоку.
3. Здійснити градуювання вказівника положення Для цього необхідно виставити вказівник затвору засувки в положення відкриття відповідно на 25, 50, 75, 100% і зафіксувати покази на шкалі вказівника положення.
4. Провести налаштування кінцевих вимикачів Для цього необхідно відкрутити гвинти, що утримують відповідні кінцеві вимикачі і перемістити вимикач SQ1 (відкрито) вниз, а вимикач 802 (закрито) вверх Прослідкувати за зміною показів вказівника положення.
5. Визначити основні механічні показники ВМ.
Контрольні запитання
1. Пояснити функціональне призначення кінцевих вимикачів SQ1 та SQ2
2. Назвати основні механічні характеристики ВМ
3. Вказати порядок перевірки кіл керування та сигналізації
4. Вказати порядок перевірки напряму обертання вала електродвигуна
5. Пояснити роботу схеми на відкриття при різних режимах роботи
6. Пояснити роботу схеми на закриття при різних режимах роботи
4 Лабораторна робота №4
«Дослідження роботи позиціонерів»
Мета, завдання і тривалість роботи.
МЕТА: Набути навики роботи з позиціонерами і засвоїти їх принцип роботи.
ЗАВДАННЯ: Вивчити принцип роботи позиціонерів.
ТРИВАЛІСТЬ РОБОТИ: 2 академічні години.
Основні теоретичні положення
Позиціонери призначені для зменшення розузгодження між вхідним командним пневматичними сигналом і відповідним цьому сигналу переміщенням вихідного елемента виконавчого механізму за рахунок введення зворотнього зв’язку від положенням його штока. Позиціонер підвищує швидкодію вихідної ланки виконавчого механізму і його точність.
Не дивлячись на те, що позиціонери мають низку переваг, їх використання при роботі з виконавчими механізмами не завжди обов’язкове. Проте існують умови, при яких використовувати позиціонери необхідно, наприклад:
при роботі виконавчого механізму з нестандартними тисками командного сигналу. Позиціонер при цьому використовують як реле пропорційності або як підсилювач вихідного сигналу регулятора; у випадку, коли повний хід виконавчого механізму має здійснюватися при подачі на привід лише частини вихідного сигналу регулятора; при дроселюванні в’язких рідин.
Розглянемо конструкцію та принцип дії опозиціонерів зі зворотними зв’язками за переміщенням (рисунок 4.1)
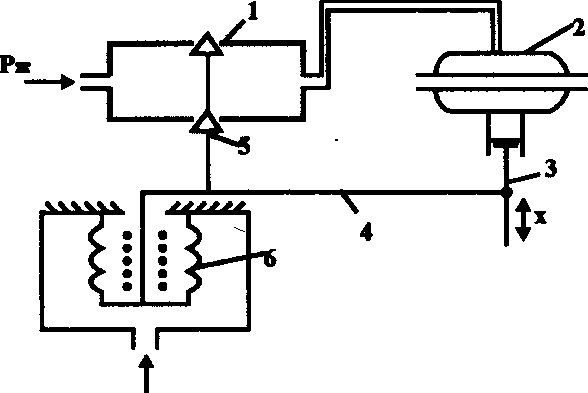
Рисунок 4.1 – Позиціонери зі зворотними зв’язками за переміщенням
Тиск Рвх поступає в сильфон 6. Зростання Рвх приводить до деформації сильфона, що зменшує стравлювання повітря в атмосферу через клапани 5 підсилювача 1. Тому тиск після підсилювача потужності зростає і передається на ВМ 2. При цьому шток 3 приводу переміщується вниз разом з вантажом 4, що привідкриває клапан 5, стравлюючи повітря в атмосферу. Шток 3 переміщується до тих пір поки не зрівноважиться тиск Рвх, з точністю до статичної помилки. Дана позиція не буде залежати від сторонніх факторів впливу на ВМ (зміни навантаження, зміни сил тертя між штоком і корпусом, зміни характеристики мембрани і пружини). Дня неперервних сигналів керування використання ВМ з позиціонером є обов'язковим (інакше характеристика ВМ буде нелінійною), а для дискретних схем керування наявність позиціонерів не обов'язкова.
Принцип роботи позиціонера базується на перетворенні імпульсу, який поступає від регулюючого приладу, в тиск повітря, необхідного для забезпечення заданого ходу дросельного органа. Застосовуються позиціонери для підвищення потужності та швидкодії ВМ.
Технічні характеристики позиціонерів приведені в таблиці 4.1.
Всі позиціонери, крім П4-10-У1, мають вмонтований редуктор. При поставці позиціонери комплектуються фільтрами повітря, а позиціонер П4-10-1-стабілізатором тиску повітря. Важільні позиціонери в залежності від способів кріплення (Г - подібним кронштейном або планкою) позначаються індексом А і Б відповідно. В залежності від напряму руху вихідної ланки позиціонери випускаються у двох виконаннях: для встановлення на МИМах прямої дії (позначаються індексом П), і зворотньої дії (індексом ПО).
Позиціонери випускаються налаштованими на хід штока 25 мм (позиціонер П4-10-У1-10 мм). Зміна ходу кратна 25 мм забезпечується за рахунок отворів на важелі зворотнього зв’язку.
Позиціонери прямої дії з умовним ходом від 10 до 75 мм і зворотньої дії з умовним ходом від 25 до 100 мм - три отвори.
Якщо позиціонер встановлюється на МИМ з ходом штока, не кратним 25 мм (а позиціонер П4-10-У1 на МИМ з ходом штока 10 мм), то перед монтажем необхідно здійснити переналаштування, тобто налаштування його ходу у відповідності з ходом штока МИМа, яка здійснюється зміною числа робочих витків пружини зворотнього зв’язку. Орієнтовно встановлюється число робочих витків регулювальною гайкою виходячи з наступних вимог приведених в таблицях 4.1 і 4.2.
Умовне позначення |
Напрям руху вихідної ланки |
Межі налаштування вихідної ланки |
Спосіб приєднання до МИМу |
Пристрій зворотнього зв’язку |
Основна допустима похибка, %від величини умовного ходу |
Варіація, %від величини умовного ходу |
П4-10-V1 |
Пряме і зворотнє |
4-10 |
Штуцерами |
Безпосереднє |
1,5 |
1,5 |
П10-25-V1 |
10-25 |
|||||
П10-75-А-V1 |
Пряме |
10-75 |
Г-подібним кронштейном |
Важільне |
2,5 |
2,5 |
П10-75-Б-V1 |
Планкою |
|||||
П10-100-А-V1 |
10-100 |
Г-подібним кронштейном |
||||
П10-100-Б-V1 |
Планкою |
|||||
П025-100-А-V1 |
Зворотнє |
25-100 |
Г-подібним кронштейном |
|||
П025-100-Б-V1 |
Планкою |
Таблиця 4.1 - Залежність ходу штока позиціонера від робочих витків пружини
Хід штока позиціонера, мм |
Число робочих витків пружини |
4 |
1,5 |
6 |
2,2 |
10 |
3,6 |
16 |
5,8 |
25 |
9,0 |
40 |
7,2 |
60 |
7,2 |
100 |
9,0 |
Таблиця 4.2 - Технічні характеристики позиціонерів