

Хід роботи
1. Здійснити перевірку кіл керування та сигналізації згідно схеми стенду (рисунок 2.4).
1.1. Встановити вручну затвір засувки в середнє положення;
1.2. Подати напругу в коло керування;
1.3. Повернути перемикач SA1 в положення "Д";
1.4. Натиснути кнопку SВ1 (відкрито), при цьому повинне спрацювати реле К2 і засвітитися лампа HL2;
1.5. Натиснути на кінцевий вимикач SQ1, при цьому реле К2 повинне вимкнутися, а лампа HL2 – погаснути;
1.6. Натиснути кнопку SВ2 (закрито), при цьому повинно спрацювати реле К3 і засвітитися лампа HL3;
1.7. Натиснути на кінцевий вимикач SQ2, при цьому реле К3 повинне вимкнутися, а лампа HL2 – погаснути;
1.8. Перевіряють відповідність напряму обертання вала електродвигуна необхідному.
Для цього необхідно:
а) встановити по шкалі вказівник затвору засувки в середнє положення;
б) подати напругу в коло керування і в силове коло;
в) натиснути кнопку SB1 (відкрито) і прослідкувати за стрілкою вказівника, якщо стрілка вказівника переміщується в сторону закриття, то необхідно зупинити привід, а в силовому колі керування перекинути місцями контакти пускових реле;
2 Визначити час розгону при переміщенні штоку на 10%, 20%, 30%, 40%, 50% і за даними побудувати залежність часу розгону від переміщення штоку.
3 Здійснити градуювання вказівника положення. Для цього необхідно встановити вказівник затвору засувки в положення відкриття відповідно на 25, 50, 75, 100% і зафіксувати покази на шкалі вказівника положення.
4. Провести налаштування кінцевих вимикачів. Для цього необхідно відкрутити гвинти, що утримують відповідні кінцеві вимикачі і перемістити вимикач SQ1 (відкрито) вниз, а вимикач SQ2 (закрито) вверх. Прослідкувати за зміною показів вказівника положення.
5. Визначити основні механічні показники ВМ.
Контрольні запитання
Чим відрізняється однообертовий виконавчий механізм від багатообертового?
Коли виникає необхідність їх використання?
Які елементи входять до складу однообертового ВМ?
3 Лабораторна робота №3 «Багатообертові виконавчі механізми» Мета, завдання і тривалість роботи.
МЕТА: Ознайомитись з конструкцією, принципом роботи багатообертових виконавчих механізмів та набуття навиків по перевірці кіл керування та сигналізації, визначення основних .
ЗАВДАННЯ: Вивчити конструкцію та принцип роботи багатообертових виконавчих механізмів.
ТРИВАЛІСТЬ РОБОТИ: 2 академічні години.
Основні теоретичні положення
Основні технічні вимоги до схем керування.
Електричні схеми керування багатообертовими ВМ в загальному випадку повинні задовільняти наступним основним вимогам:
1) схеми повинні мати захист від перевантажень і коротких замикань в силових колах керування та сигналізації. При виконанні схем керування та сигналізації котушки магнітних пускачів повинні бути приєднані до нульового проводу. Така побудова схем запобігає їх помилковому спрацюванню при появі "землі" в колах керування;
2) схема керування повинна виключати можливість одночасної подачі командних імпульсів від пристроїв автоматичного та дистанційного керування, а також можливість подачі живлення на одну з котушок реверсивного магнітного пускача при обтіканні струмом другої котушки;
3) схеми керування з двох чи більше місць повинні бути побудовані таким чином, щоб була виключена можливість одночасного керування одним пристроєм з різних пунктів;
4) бажано, щоб схема керування забезпечувала можливість зупинки ВМ в будь-якому проміжному положенні, а також можливість посилання команди як на відкриття, так і на закриття. Вказана умова забезпечує зупинку помилково початої операції і повернення у вихідне положення, а також поступове відкриття чи закриття ВМ з короткочасними зупинками в проміжних положеннях, якщо це вимагається умовами технологічного процесу;
5) нормальна зупинка ВМ в положенні повного відкриття чи закриття повинна здійснюватися з допомогою кінцевих вимикачів, що розривають коло живлення відповідної котушки реверсивного магнітного пускача. Якщо запірні пристрої потребують примусового ущільнення при закритті, зупинка ВМ повинна здійснюватися за допомогою контактного пристрою муфти граничного моменту чи струмового реле;
6) схема керування запірним органом повинна забезпечувати можливість як дистанційного керування зі щита чи по місцю, так і автоматичного управління по команді від пристрою регулювання чи блокування;
7) схема керування приводом повинна забезпечувати рух останнього тільки під час дії імпульсу автоматичного та дистанційного керування.
Опис лабораторної установки.
Загальний вигляд лабораторної установки показано на рисунок 3.1. Лабораторна установка складається з багатообертового ВМ, встановленого на ділянці трубопроводу, та панелі керування ним. Регулюючий клапан зібраний у вигляді моноблоку і складається з електродвигуна 5, редуктора 6, який призначений для перетворення обертального руху валу електродвигуна в поступовий рух штока, блоку кінцевих вимикачів 7,регулюючого органу 8.
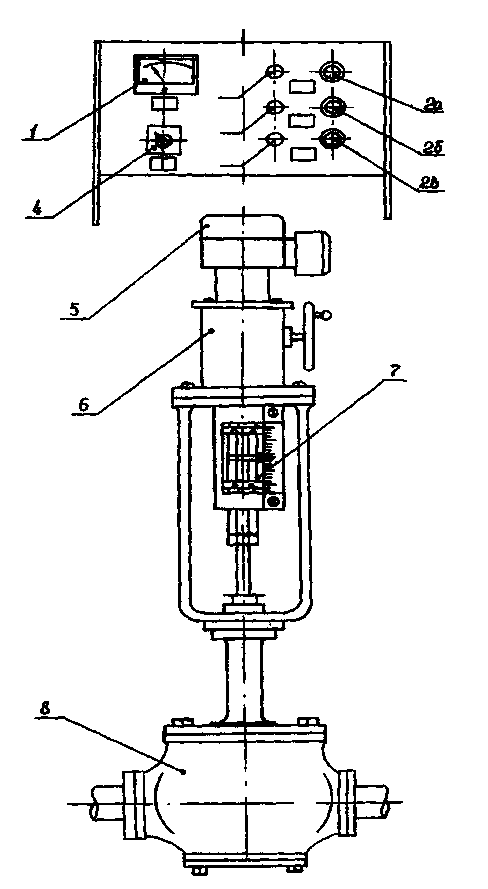
1-вказівник;
2а,2б,2в-кнопки керування;
За,3б,3в-сигнальні лампи;
4-перемикачрежимів роботи;
5-електро двигун; 6-редуктор;
7-блок кінцевих вимикачів;
8-регулюючий орган.
Рисунок 3.1 – Лабораторна установка
Панель керування забезпечує можливість дистанційного керування і складається з: вказівника положення 1; кнопок керування SB1 (стоп), SB2 (відкрито), SB3 (закрито), на рисунку відповідно 2а, 26, 2в; сигнальних ламп Л1(стоп), Л2(відкрито), Л3(закрито), на рисунку відповідно 3а, 36, 3в та перемикача режимів роботи 8АІ- 4.
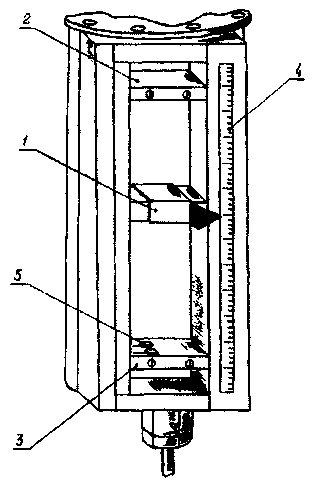
1-рухомий контакт з вказівником;
2-кінцевий вимикач верхнього положення;
3-кінцевий вимикач нижнього положення;
4-шкала;
5-контакти вимикача.
Рисунок 3.2. – Блок кінцевих вимикачів
На рисунку 3.2 приведено загальний вигляд блоку кінцевих вимикачів, який складається з рухомого контакту з покажчиком 1, платформами з кінцевими вимикачами верхнього і нижнього положення 2 і 3 відповідно, шкали 4. Даний блок призначений для налаштування відповідних кінцевих вимикачів. Налаштування проходить шляхом переміщення відповідної платформи з кінцевими вимикачами вверх або вниз.
На рисунку 3 приведено блок реохорда, який служить для перетворення механічного руху штоку в електричний сигнал, для подальшої передачі цього сигналу на вказівник положення. Блок реохорда складається з реохорда 1, контактних доріжок 2, обмежувачів ходу реохорда 3.

1-реохорд;
2- контактні доріжки;
3- обмежувач ходу реохорда;
4-жгут провідників;
Рисунок 3.3 - Блок реохорда
Перед пуском ВМ необхідно ретельно перевірити монтаж електричної схеми, так як помилка в ній може викликати поломку запірного органу чи приводу. Перевірку кіл керування та сигналізації необхідно проводити при відключеному електродвигуні на його клемниках.
Основними механічними показниками ВМ є:
Максимальне середньодобове число включень за 1 годину (ПВ%) Ця величина знаходиться за графіком, що приведений на рисунок 3.5, або визначається за формулою:
![]() ,
,
де n - число вмикань ектродвигуна за 1 годину.
2) Момент на валу електродвигуна:
Мдв = Мпс /(ipp),
де ір- передаточне число редуктора,
Рисунок 3.4 - Принципова електрична схема керування та сигналізації виконавчого механізму
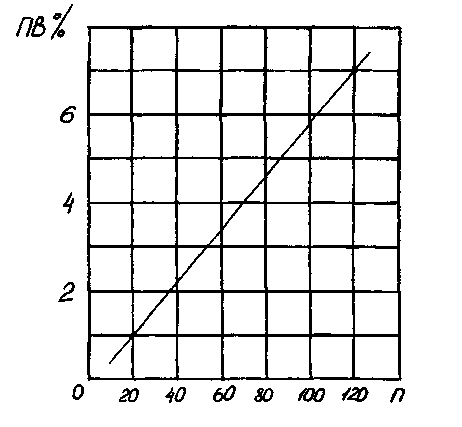
Рисунок 3.5 - Графік залежності максимального середньодобового числа ввімкнень за 1 годину (ПВ%) від числа цих вмикань
р- коефіцієнт корисної дії редуктора,
Мпс - перестановочний момент механізму, кгсм. Стандартний ряд Мпс 0.63, 1.6, 4, 10, 25, 63, 160.
3) Потужність електродвигуна з врахуванням знайденого значення ПВ%, потужність у ВТ визначається за формулою:
Nдв=0,0103Мдвnдв,
де nдв - число обертів двигуна, об/хв.