

Хід роботи
1. За допомогою інструментарію SIMULINK (пп. MATLAB6) змоделювати динамічну структуру пневматичного мембранно-пружинного виконавчого пристрою без додаткових блоків.
2. Дослідити часові характеристики односідельного РО з Dу = 80; 150; 250 мм. при подачі на вхід системи:
а) стрибкоподібного впливу;
б) синусоїдального сигналу.
Досліди провести при різних значеннях параметрів моделі.
3. Змоделювати динамічну структуру виконавчого пристрою з корегуючим блоком:
а) підсилювачем потужності;
б) позиціонером.
4. Дослідити часові характеристики ВП з підсилювачем потужності і з позиціонером для варіантів:
а) із врахуванням тертя;
б) без врахування тертя.
5. Змоделювати структурну схему АСК з додатковими блоками і без них.
6. Дослідити перехідні процеси в АСК для різних структур ВМ.
Контрольні запитання
Як впливають конструктивні параметри ВМ на їх динаміку?
Як впливають ВМ на динаміку системи керування?
Від чого залежить коефіцієнт підсилення РО?
9 Лабораторна робота №9
«Лабораторна установка з блоком ручного управління»
Мета, завдання і тривалість роботи.
Мета: Ознайомитись з конструкцією, принципом роботи блоку ручного управління бру-10 та набуття навиків по перевірці кіл керування та сигналізації, визначення основних показників.
ЗАВДАННЯ: Вивчити конструкцію і принцип роботи блоку ручного управління БРУ-10.
ТРИВАЛІСТЬ РОБОТИ: 4 академічні години.
Основні теоретичні положення
Основні технічні вимоги до схем керування.
Електричні схеми керування багатообертовими ВМ в загальному випадку повинні задовольняти наступним основним вимогам:
1) схеми повинні мати захист від перевантажень і коротких замикань в силових колах керування та сигналізації. При виконанні схем керування та сигналізації котушки магнітних пускачів повинні бути приєднані до нульового проводу. Така побудова схем запобігає їх помилковому спрацюванню при появі "землі" в колах керування;
2) схема керування повинна виключати можливість одночасної подачі командних імпульсів від пристроїв автоматичного та дистанційного керування, а також можливість подачі живлення на одну з котушок реверсивного магнітного пускача при обтіканні струмом другої котушки;
3) схеми керування з двох чи більше місць повинні бути побудовані таким чином, щоб була виключена можливість одночасного керування одним пристроєм з різних пунктів;
4) бажано, щоб схема керування забезпечувала можливість зупинки ВМ в будь-якому проміжному положенні, а також можливість посилання команди як на відкриття, так і на закриття. Вказана умова забезпечує зупинку помилково початої операції і повернення у вихідне положення, а також поступове відкриття чи закриття ВМ з короткочасними зупинками в проміжних положеннях, якщо це вимагається умовами технологічного процесу;
5) нормальна зупинка ВМ в положенні повного відкриття чи закриття повинна здійснюватися з допомогою кінцевих вимикачів, що розривають коло живлення відповідної котушки реверсивного магнітного пускача. Якщо запірні пристрої потребують примусового ущільнення при закритті, зупинка ВМ повинна здійснюватися за допомогою контактного пристрою муфти граничного моменту чи струмового реле;
6) схема керування запірним органом повинна забезпечувати можливість як дистанційного керування зі щита чи по місцю, так і автоматичного управління по команді від пристрою регулювання чи блокування;
7) схема керування приводом повинна забезпечувати рух останнього тільки під час дії імпульсу автоматичного та дистанційного керування.
Дана лабораторна робота передбачає використання імпульсного режиму роботи, на рисунку 1 приведена схема аналогово керування.
Лабораторна установка складається з багатообертового ВМ, встановленого на ділянці трубопроводу і блоку ручного управління БРУ-10.
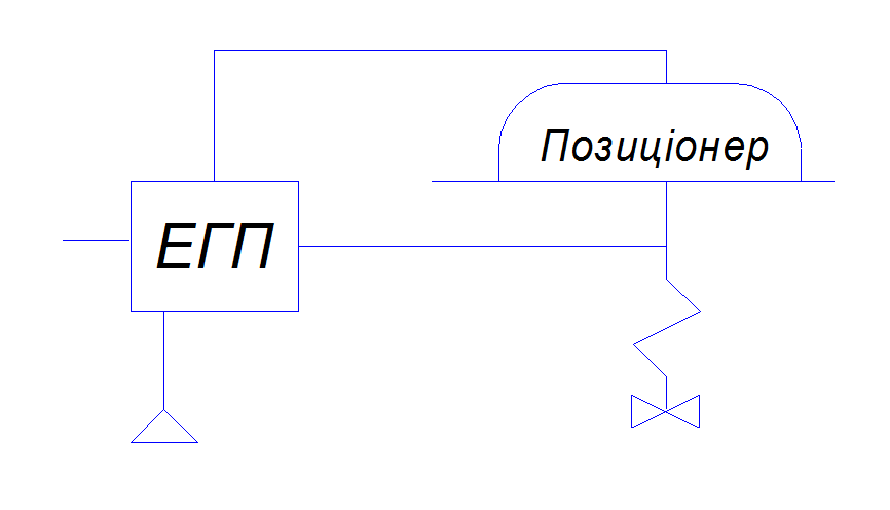
ЕГП - електропневмоперетворювач
Рисунок 9.1 – Аналогове керування
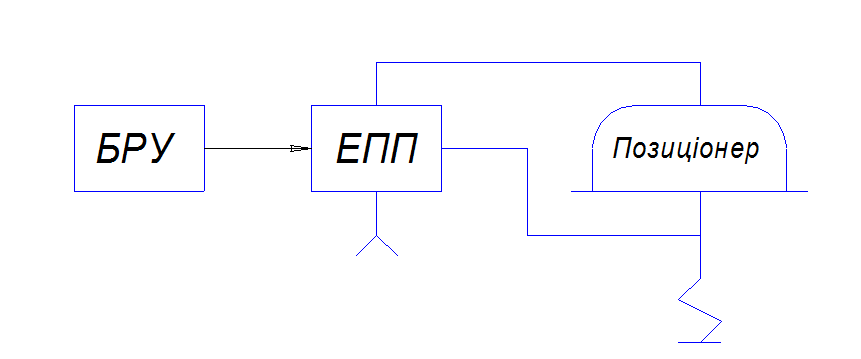
Рисунок 9.2 - Пневматичний привід
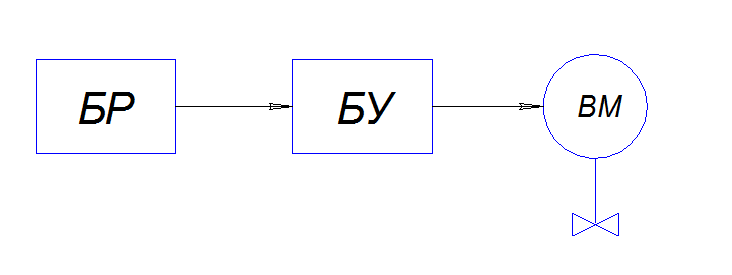
Рисунок 9. 3 – Електропривід