

ЗМІСТ
ЗАГАЛЬНІ МЕТОДИЧНІ ВКАЗІВКИ………………….….4
Лабораторна робота №1…………………………………5
Лабораторна робота №2. ………………………………22
Лабораторна робота №3. ………………………………32
Лабораторна робота №4. ……………………………....41
Лабораторна робота №5. …………………………...….47
Лабораторна робота №6. ………………………………53
Лабораторна робота №7. …………………………...….58
Лабораторна робота №8. ………………….. ………….69
Лабораторна робота №9. ……………………………...81
Перелік рекомендованих джерел……………………...93
ЗАГАЛЬНІ МЕТОДИЧНІ ВКАЗІВКИ
Лабораторний практикум з курсу “Виконавчі механізми і регулюючі органи” напрямку підготовки 0925 – Автоматизація та комп’ютерно -інтегровані технології для студентів спеціальності – “Автоматизоване управління технологічними процесами” написані у відповідності з програмою курсу і містить лабораторні роботи з основних розділів дисципліни. Практикум складається із 8 лабораторних занять, які мають наступну структуру: короткі теоретичні засади до лабораторного заняття, порядок виконання лабораторної роботи і контрольні питання.
Цей практикум буде корисний студентам спеціальності 7.092501 при підготовці до практичних занять та іспитів з дисципліни, а також можуть бути використані при курсовому проектуванні.
1 Лабораторна робота №1 «Система імітаційного моделювання Simulink
( ПП MATLAB 6.0)»
Мета, завдання і тривалість роботи.
МЕТА: Набути навиків роботи в інструментарії Simulink.
ЗАВДАННЯ: вивчити склад бібліотеки елементів (Library:simulink).
ТРИВАЛІСТЬ РОБОТИ: 4 академічні години.
Основні теоретичні положення
Система матричної математики MATLAB 6.0 являє собою математичну мову для спрощення обчислень. На базі цієї мови розроблено багато різноманітно орієнтованих програм та модулів, які працюють в середовищі MATLAB 6.0, одна з яких Simulink.Вона призначена для проектування всіх можливих схем (систем) автоматичного керування та моделювання.
Для входження в прикладний пакет Simulink потрібно запустити MATLAB 6.0, з'явиться командне вікно (MATLAB Command Window) (рисунок.1.1). В цьому вікні потрібно набрати команду simulink та натиснути клавішу Enter, щоб запустити модуль роботи з бібліотекою типових ланок та моделювання.

Рисунок 1.1 - Командне вікно MATLAB 6.0
Якщо все виконано вірно, з'являться два вікна: вікно бібліотеки елементів (Library:simulink) та вікно моделювання (Untitled). Ці вікна зображені на рисунку 1.2 та на рисунку 1.3.
Рисунок 1.2 - Вікно моделювання (Untitled)
Для того, щоб створити схему для моделювання необхідно вибрати з бібліотеки блоків необхідну ланку і перетягнути її, затиснувши ліву кнопку мишки, на вікно моделювання.
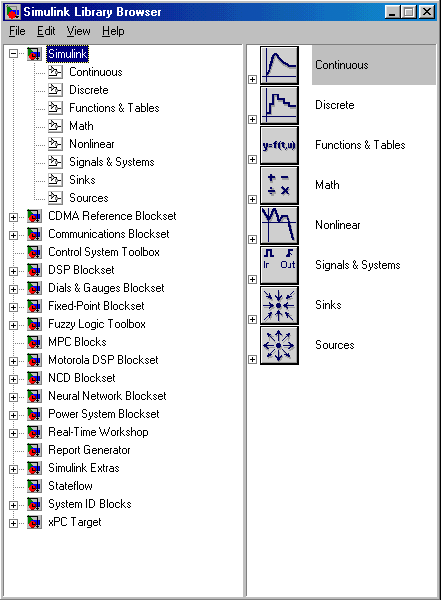
Рисунок 1.3 - Вікно бібліотеки елементів (Library:simulink)
Бібліотека елементів складається з восьми бібліотек:
- Continuous (лінійні)
- Discrete (дискретні елементи);
- Functions & Tables (функції та таблиці);
- Math (математичні);
- Nonlinear (нелінійні елементи);
- Signal & Systems (сигнали і системи);
- Sinks (засоби відображення вихідних даних);
- Sources (джерело початкових сигналів);
Вигляд бібліотек приведений на рисунках 1.8-1.15.
В усіх представлених ланках на рисунках можна змінювати параметри, для цього необхідно два рази клацнути по потрібній ланці та з клавіатури ввести необхідні параметри.
Коли всі модулі знаходяться в вікні моделювання з'єднайте їх, протягнувши лінії (утримуючи ліву кнопку мишки) від трикутників на ланках, які показують їх входи і виходи.
Приклад:
Необхідно зібрати просту систему з
ланкою
![]() ,
де К=0,4; Т=20; та побудувати графік
перехідного процесу.
,
де К=0,4; Т=20; та побудувати графік
перехідного процесу.
Виберемо початковий сигнал. Для цього переключимося в вікно Library:simulink, клацнимо два рази лівою кнопкою миші на блоці з надписом Sources (джерело початкових сигналів). Відкривається ще одне вікно Library:simulink/Sources в якому ми зможемо вибрати необхідний початковий сигнал. Виберемо блок Step, клацнувши на нього лівою кнопкою мишки.

Рисунок 1.4 – Бібліотека Sources (джерело початкових сигналів)
Блок Step генерує скачок сигналу, який називається також "сходинка". Утримуючи в натиснутому стані ліву кнопку мишки, перетягнемо його в вікно моделювання Untitled. Вікно Library: simulink/Sources тепер можна закрити.
Тепер треба вибрати блок-ланку, яка відповідає нашій W(p). Для цього знову переключимося в вікно Library: simulink і клацнемо два рази лівою кнопкою миші на блоці з написом Linear (лінійні). Відкривається ще одне вікно Library:simulink/Linear, в якому ми зможемо вибрати необхідний блок. Виберемо Transfer Fen (передавальна функція), клацнувши на нього лівою кнопкою мишки. Перетягнемо його в вікно моделювання.
По аналогії розміщуємо елемент який будує графіки (Scope). З'єднуємо розміщені елементи лініями зв'язків.
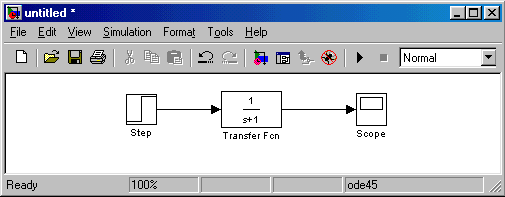
Рисунок 1.5 – Схема дослідження простої системи.
При моделюванні задамо час проходження процесу (натисніть Ctrl-E). Start time - початковий час. Stop time - кінцевий час.
Процес моделювання
запускається натисканням кнопки
![]() в панелі інструментів. Для перегляду
результатів клацніть два рази по ланці
Scope.
в панелі інструментів. Для перегляду
результатів клацніть два рази по ланці
Scope.
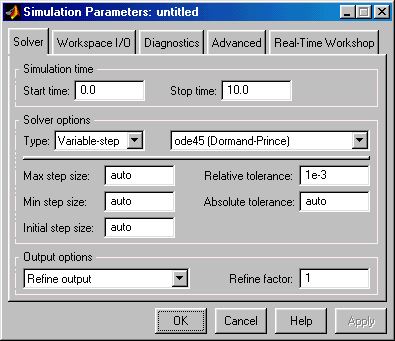
Рисунок 1.6 – Налагодження блока Scope.
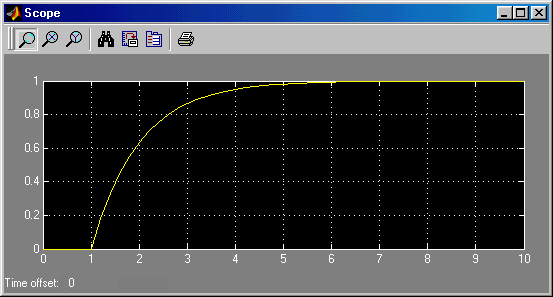
Рисунок 1.7 – Графічне вікно Scope.