

Тема 2. Технические средства измерений электрических величин. Урок 1. Магнитоэлектрические приборы и их применение.
М агнитоэлектрические
приборы (МЭП),
как и любые электромеханические
измерительные приборы, состоят из трех
основных преобразователей: измерительной
цепи (ИЦ)
измерительного
механизма
(ИМ) и отсчетного
устройства
(ОУ).
агнитоэлектрические
приборы (МЭП),
как и любые электромеханические
измерительные приборы, состоят из трех
основных преобразователей: измерительной
цепи (ИЦ)
измерительного
механизма
(ИМ) и отсчетного
устройства
(ОУ).
Рис. 2.1. Структурная схема электромеханического измерительного прибора.
Конструктивно измерительный механизм может быть выполнен либо с подвижным магнитом, либо с подвижной катушкой. На рис. 2.2 показана конструкция прибора с подвижной катушкой.
Рис.2.2. Устройство магнитоэлектрического прибора.
Постоянный магнит 1, магнитопровод с полюсными наконечниками 2 и неподвижный сердечник 3 составляют магнитную систему механизма. В зазоре между полюсными наконечниками и сердечником создается сильное равномерное радиальное магнитное поле, в котором находится подвижная прямоугольная катушка 4, намотанная медным или алюминиевым проводом на алюминиевом каркасе (применяют и бескаркасные рамки). Катушка (рамка) может поворачиваться в зазоре на полуосях 5 и 6. Спиральные пружины 7 и 8 создают противодействующий момент и используются для подачи измеряемого тока от выходных зажимов прибора в рамку. Рамка жестко соединена со стрелкой 9. Для балансировки подвижной части имеются передвижные грузики 10.
Принцип действия МЭП. Проходя по проводникам обмотки рамки, ток I взаимодействует с магнитным потоком постоянного магнита, что вызывает появление механических сил F, создающих вращающий момент Мвр для рамки. Из теоретических основ электротехники известно выражение для механической работы, совершаемой при перемещении проводника с током в магнитном поле:
F dα = dWМ ,
где F— сила, действующая на проводник в направлении элементарного перемещения
dα; dWМ - изменение запаса энергии магнитного поля.
Если проводник движется по окружности с радиусом r, то
dx=r dα,,
где dα — элементарный угол поворота.
Следовательно,
Fdα=dWМ .
Здесь Fr— вращающий момент - МВР, т. е.
МВР dα = dWМ .
Тогда окончательно запишем:
МВР = dWМ / dα. (2.1)
Это уравнение является обобщенным выражением вращающего момента для всех приборов, в которых используют сила электромагнитного поля.
Противодействующий момент в приборах необходим для создания однозначного соответствия измеряемой величины определенному углу отклонения подвижной части. В аналоговых электромеханических приборах противодействующий момент создается либо при помощи спиральных пружин (растяжек и подвесов), либо за счет энергии электромагнитного поля (в логометрах).
В случае, когда противодействующий момент создается спиральной пружинкой
МПР = W·α, (2.2)
где W – удельный противодействующий момент, зависящий от геометрических размеров и материала пружины (растяжек)
Уравнение шкалы. Выражение для вращающего момента, действующего на рамку при протекании по ней тока I, может быть получен, исходя из обобщенного выражения вращающего момента (2.1). Запас электромагнитной энергии в контуре с током I, находящемся в поле постоянного магнита, выражается формулой:
WМ = І·Ψ,
где Ψ— полное потокосцепление данного контура с магнитным полем постоянного магнита. Тогда
МВР = Ι·dΨ / dα. (2.3)
При повороте рамки на угол dα каждая ее сторона опишет дугу dα·b/2, пересекая при этом силовые линии магнитного поля; число пересеченных линий будет равно произведению пройденного пути dα·b/2 на длину активной стороны рамки l и на индукцию в зазоре В.
Полное изменение потокосцепления с рамкой равно произведению числа силовых линий, пересеченных обеими сторонами рамки, на число витков ее обмотки, т. е.
dΨ = 2·Βlω dα·b/2,
где ω - число витков обмотки.
Произведение·Βl равно площади рамки; обозначив ее через S, получим:
dΨ =BSωdα.
Если положить dα =1 рад, то произведение BSω - величина постоянная для каждого данного прибора - будет равна изменению потокосцепления при повороте рамки на 1 рад. Обозначая его через Ψ0, запишем:
Ψ0 = BSω [вб/рад], (2.4)
Тогда
dΨ = Ψ0 · dα. (2.5)
Подставляя выражение (2.5) формулу (2.3), получим выражение вращающего момента для магнитоэлектрического механизма в следующем виде:
МВР = Ι · Ψ0. (2.6)
Установившееся положение подвижной катушки наступает при равенстве вращающего и противодействующего моментов МВР = МПР, т.е. с учетом (2.2) запишем:
Ι ·Ψ0 = W·α. (2.7)
Отсюда находим уравнение шкалы измерительного механизма магнитоэлектрической системы
α = Ι · Ψ0 / W
или
α = S · Ι, (2.8)
где величина S = Ψ0 / W является чувствительностью прибора (в радианах на ампер).
Используя выражение (2.4) можно ввести в уравнение шкалы конструктивные параметры измерительного механизма:
α = Bsω Ι · 1/W, (2.9)
т.е. угол отклонения подвижной части прямо пропорционален току в рамке, поэтому магнитоэлектрические приборы имеют равномерные шкалы.
Успокоение подвижной части магнитоэлектрических приборов магнитоиндукционное, т.е. создается взаимодействием магнитных полей от вихревых токов в каркасе рамки и поля постоянного магнита.
Достоинства: высокий класс точности, равномерная шкала, высокая и стабильная чувствительность, малое собственное потребление мощности, большой диапазон измерений, на показания МЭП не влияют внешние магнитные и электрические поля.
Недостатки: без преобразователей МЭП используют только в цепях постоянного тока, имеют малую нагрузочную способность, сложны и дороги, на их показания влияют колебания температуры.
Метрологические характеристики MЭП: классы точности – 0,05; 0,1 и т.д., равно-мерная шкала, высокая и стабильная чувствительность, малое собственное потребление мощности, большой диапазон измерений, большой МВР, успокоение только магнитоиндукционное.
Применение: Магнитоэлектрические измерительные механизмы используют в амперметрах, вольтметрах, гальванометрах (обычных, баллистических и вибрационных) и омметрах.
МЭП используют для измерения постоянного тока – I, напряжения – U, сопротивления – R.
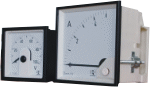
Рис. 2.3. Магнитоэлектрические измерительные приборы серии PQ
Магнитоэлектрические приборы могут быть использованы и для измерения переменного тока и напряжения, но с преобразователями переменного тока в постоянный. Это выпрямительные, термоэлектрические и электронные приборы. Обычно такие приборы градуируются в действующих значениях тока или напряжения.
На рис. 2.3. представлены магнитоэлектрические измерительные приборы серии PQ, которые используются для измерения постоянного тока или напряжения; диапазон измерений от 100mА до 100А, от 15mV до 600V ; сменные шкалы; работа с шунтами; монтаж на щите; габаритные размеры: 48 х 48, 72 х 72, 96 х 96, 144 x 144. Класс точности 1,5;
Измерение постоянного тока и напряжения
Такие измерения производят в основном с помощью магнитоэлектрических амперметров и вольтметров.
Измерительный механизм магнитоэлектрических амперметров и вольтметров принципиально не различаются, а в зависимости от назначения прибора меняется его измерительная цепь. В амперметрах измерительный механизм непосредственно или с помощью шунта включается в цепь последовательно с нагрузкой. В вольтметрах последовательно с измерительным механизмом включается добавочный резистор, и прибор подключается к тем точкам схемы, между которыми необходимо измерить напряжение.
Прямое измерение малых токов и напряжений осуществляется с помощью гальванометра магнитоэлектрической системы. Они представляют собой прибор высокой чувствительности по току и напряжению с неградуированной шкалой. Преимущественное применение гальванометры получили при нулевых методах измерения в качестве приборов, позволяющих с большой точностью фиксировать отсутствие тока в цепи. Гальванометры после соответствующей градуировки могут быть использованы для измерений весьма малых токов и напряжений и для измерения количества электричества.
Существует много различных видов гальванометров, но массовое распространение получили две модификации: гальванометры с подвижной рамкой; гальванометры с подвижным магнитом, к которым относится так называемый вибрационный гальванометр.
Гальванометры постоянного тока. На рис. 2.4 показано устройство магнитоэлектрического гальванометра постоянного тока. Сильный постоянный магнит 1 из высококоэрцетивного сплава, полюсные наконечники 2 из магнитомягкой стали с цилиндрической расточкой концов, неподвижный стальной цилиндр 3, укрепленный в расточке, служат для создания в зазоре сильного равномерного магнитного поля. В этом зазоре находится рамка 4,укрепленная на подвесе 5; ток подводится через безмоментные спирали 6. На оси рамки закреплено зеркальце 7 для оптического отсчета угла отклонения рамки от нулевого положения.
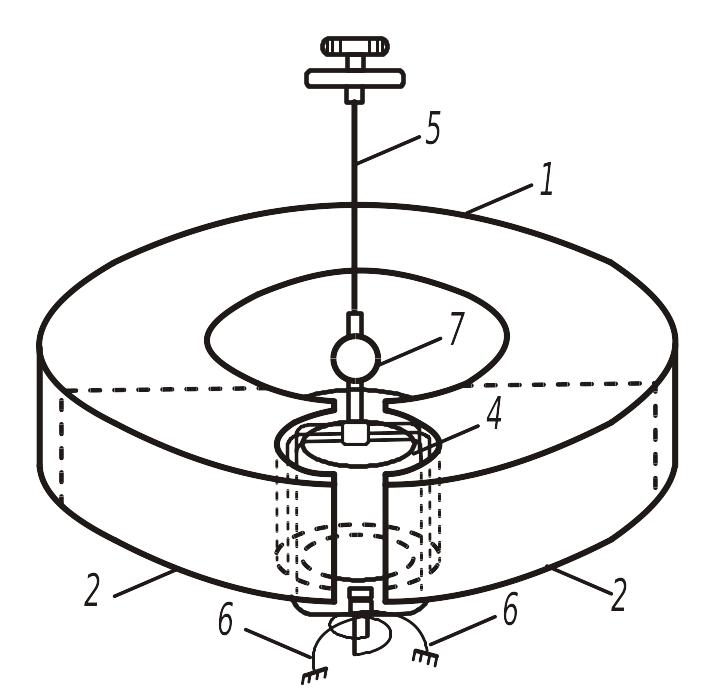
Рис. 2.4. Устройство магнитоэлектрического гальванометра.
На рамку, при подаче тока I действуют моменты: вращающий МВР (2.6), успокоения МУ = − Р dα/dt, направленный в сторону, противоположную МВР. и противодействующий момент, создаваемый при закручивании подвеса МПР = Wα.
Величина P = Ψ0 / (RГ + RВН) называется коэффициентом успокоения и определяется конструктивными параметрами гальванометра Ψ0, RГ и сопротивлением внешней цепи RВН. Изменяя RВН можно изменять коэффициент успокоения.
![]()
И звестно, что движение вращающегося тела определяется уравнением
где J – момент инерции тела; d2α/dt2 – угловое ускорение; ΣM – сумма вращающих моментов, действующих на тело.
Для гальванометра это уравнение имеет вид:
![]() (2.10)
(2.10)
Подставляя в уравнение (2.10) значения моментов с учетом их знака получим дифференциальное уравнение движения подвижной рамки гальванометра:
Интеграл этого дифференциального уравнения второго порядка с постоянными коэффициентами и с правой частью, как известно состоит из двух членов: αС –частного решения при заданных условиях и α0 – общего решения данного уравнения без правой части, т.е.
α = αС + α0 (2.11)
Частное решение уравнения (2.11), рассмотренное для случая установившегося равновесия подвижной части гальванометра, когда скорость ее движения (dα/dt ) и ускорение (d2α/dt2) будут равны нулю, через выражение (2.7) получим
αс = S1 I (2.12)
Уравнение (2.11) без правой части для получения общего решения имеет вид:
![]() (2.13)
(2.13)
Решением его будет функция
![]() (2.14)
(2.14)
Где С1 и С2 постоянные интегрирования, получаемые из начальных условий; Х1 и Х2 – корни характеристического уравнения
JX2 + PX + W = 0 (2.15)
Нахождение этих корней и подстановка их в выражение (2.13) и далее полученного значения α0 в (2.11) дает искомое аравнение движения подвижной части гальванометра:
α = F(t) (2.16)
График функции (2.16) для различных значений сопротивления нагрузки приведен на рис.2.5.
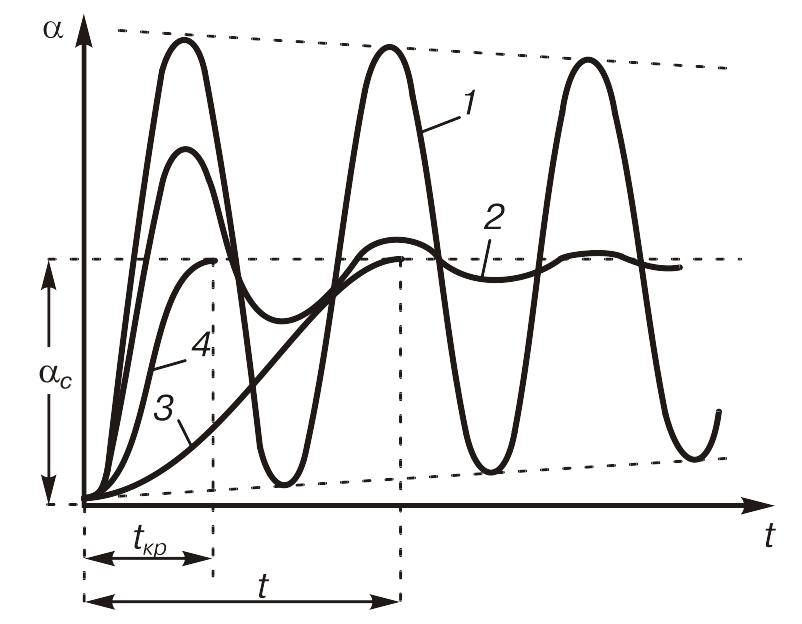
Рис.2.5. Режимы движения подвижной части гальванометра.
При RВН = ∞ колебания подвижной части гальванометра будут постепенно, хотя и медленно, затухать из-за трения подвижной рамки о воздух ( кривая 1) и режим движения рамки - колебательный.
При RКР < RВН < ∞ подвижная часть совершает затухающие колебательные движения около положения установившегося равновесия, определяемого углом αс (кривая 2)
При RВН < RКР режим движения рамки гальванометра будет апериодическим (кривая 3).
При Rвн = Rкр подвижная часть приходит в режим устойчивого равновесия без колебаний и за минимальное время (кривая 4). Этот режим называется критический.
Значение критического сопротивления Rкр предопределяет возможность применения гальванометра и его всегда указывают на шкале прибора.
Метрологические характеристики: чувствительность, период собственных колебаний, внешнее и полное критическое сопротивление.
Измерение сопротивления
Для измерения больших сопротивлений используются магнитоэлектрические омметры или омметры-логометры.
Логометры – приборы электромеханической группы, измеряющие отношение двух электрических величин α = ƒ (Х1/Х2). В логометрах вращающий и противодействующий моменты создаются электрическим путем и направлены навстречу друг другу. Логометры используются для измерения электрических величин, например сопротивления, емкости, частоты, угла сдвига фаз и др. Они широко применяются при измерении неэлектрических величин электрическими методами, например в расходомерах, измерителях уровня и др.
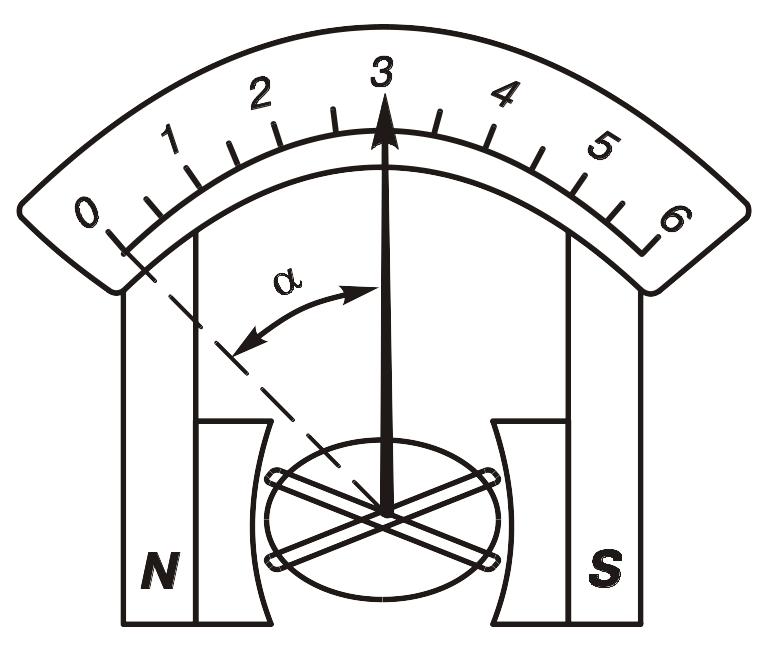
Рис. 2.6. Устройство магнитоэлектрического логометра
Устройство. На рис. 2.6 приведена схема устройства магнитоэлектрического логометра.
В поле постоянного магнита помещена подвижная часть, состоящая из двух жестко закрепленных под определенным углом рамок. Особой формой полюсных наконечников и сердечника, находящегося между ними, искусственно создается неравномерное магнитное поле постоянного магнита. Токи к рамкам подводятся через безмоментные спирали, не создающие противодействующего момента.
Направление тока в рамках логометра выбираются так, чтобы вращающие моменты М1 и М2 были направлены в разные стороны. Тогда в общем виде можно записать:
М1 = I1 · ƒ1 (α); М2 = I2 · ƒ2 (α), (2.17)
где I1 и I2 - токи в рамках; α – угол отклонения подвижной части от некоторого условного нулевого положения.
Равновесие подвижной части наступает при равенстве моментов М1 и М2, действующих на рамку т.е. при условии:
I1·ƒ1 (α) = I2 ·ƒ2 (α),
Откуда
I1 / I2 = ƒ2 (α)/ ƒ1 (α) = ƒ (α)
или
α = F (I1/ I2). (2.18)
Рис.2.7. Устройство магнитоэлектрического омметра.
Для данного случая I1 = U/(R1 + r1); I2 = U/(R2 + r2 + RX),
Где U – напряжение генератора; r1 и r2 - сопротивления обмоток рамок.
Тогда согласно выражению (2.18) уравнение шкалы прибора запишется:
α = F [(R2 + r2 + RX)/(R1 + r1)]; (2.19)
Шкала прибора градуируется в Ом.
Аналогично рассмотренному принципу построения логометрического ИМ магнитоэлектрической системы выпускают логометры электромагнитной, электродинамической, ферродинамической и индукционной систем.
Основное достоинство логометрических приборов является независимость их показаний от напряжения питания.