

Урок 7. Измерительные мосты
Классификация мостов. В зависимости от характера сопротивлений плеч, образующих мост, и рода тока, питающего мост, выделяют мосты постоянного тока и мосты переменного тока.
Мосты постоянного тока. В зависимости от вида схемы (числа плеч) мосты постоянного тока бывают четырехплечие (одинарные) и шестиплечие (двойные).
Мосты переменного тока можно разделить на две группы:
1) частотно-независимые ─ уравновешенные при одной частоте, сохраняющие равновесие при изменении частоты источника питания;
2) частотно-зависимые ─ характеризуются тем, что в условии равновесия, помимо C, L, R, имеется частота, входящая в выражение реактивных составляющих сопротивления.
Мосты выпускаются с ручным и автоматическим уравновешиванием.
Мосты постоянного тока (МПТ).
Одинарный мост, называемый мостом Уитсона, применяют для измерения сопротивлений от 1 Ом до 100 МОм. Одинарный мост (рис. 2.24) состоит из четырех плеч: ab, bc, cd и da.
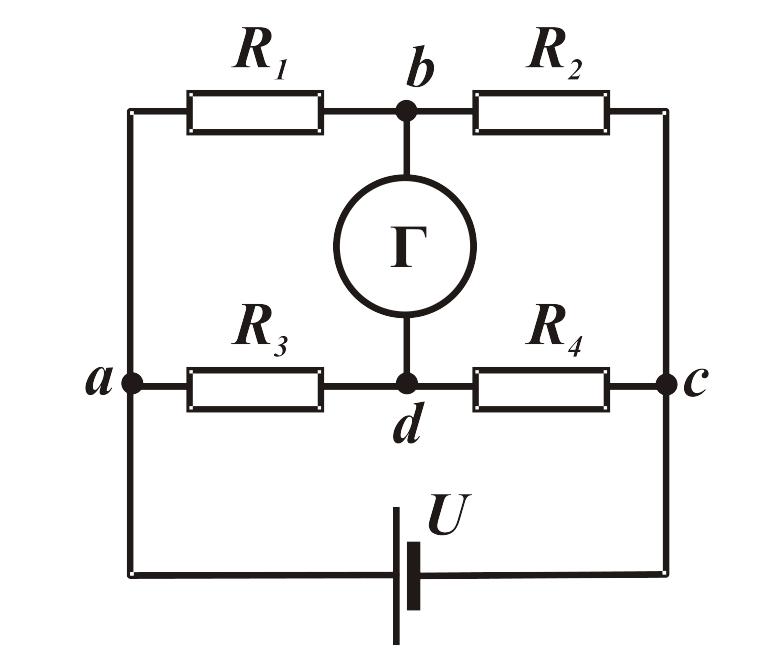
Рис. 2.24. Схема одинарного моста постоянного тока
Три известных регулируемых сопротивления R2, R3, R4 вместе с измеряемым сопротивлением R1=Rх образуют замкнутый четырехполюсник abcd. В измерительную диагональ моста (bd) включен указатель равновесия Г, в качестве которого используется магнитоэлектрический гальванометр. В диагональ питания моста (ac) включается источник постоянного тока ─ аккумуляторная батарея или сухой элемент. Подбором значений сопротивлений R2, R3, R4 добиваются отсутствия тока через гальванометр (потенциалы точек b и d равны) и, следовательно,
Iх Rх = I4 R4
I2 R2 = I3 R3.
Поскольку в момент равновесия моста ток через гальванометр не протекает Iг = 0, то Iх = I2 и I3 = I4.
Тогда правомерно записать Rх/R2 = R4/R3 или RхR3 = R2 R4,
откуда сопротивление Rх определяется по формуле
Rх = R2 R4/ R3. (2.30)
Сопротивления R2 и R3 ─ известные фиксированные сопротивления в диапазоне 1…1000 Ом. При этом отношение R2/R3 составляет от 10–3 до 103. Регулировкой сопротивления R4 уравновешивают мост.
Погрешности измерения с помощью мостов постоянного тока зависят от диапазона измеряемых сопротивлений, наименьшие погрешности получают в диапазоне 100 Ом…100 кОм. По мере увеличения измеряемого сопротивления уменьшается чувствительность мостов, а при измерении больших сопротивлений сказывается влияние сопротивления изоляции.
Нижний предел измеряемых сопротивлений ограничен тем, что при измерении малых по величине сопротивлений сказывается влияние сопротивления монтажных проводов и переходных контактов.
Для измерения малых величин сопротивлений от 1 Ом и меньше применяют двойной мост, называемый мостом Томсона. В нем влияние сопротивления монтажных проводов и переходных контактов, вызывающих погрешность измерения, сведены к минимуму.
На рис. 2.25. представлена схема двойного моста, в котором использованы резисторы R3 и R4, чтобы исключить влияние сопротивления соединительного проводника (r). Мост называется двойным, так как он содержит два комплекта плеч отношения.
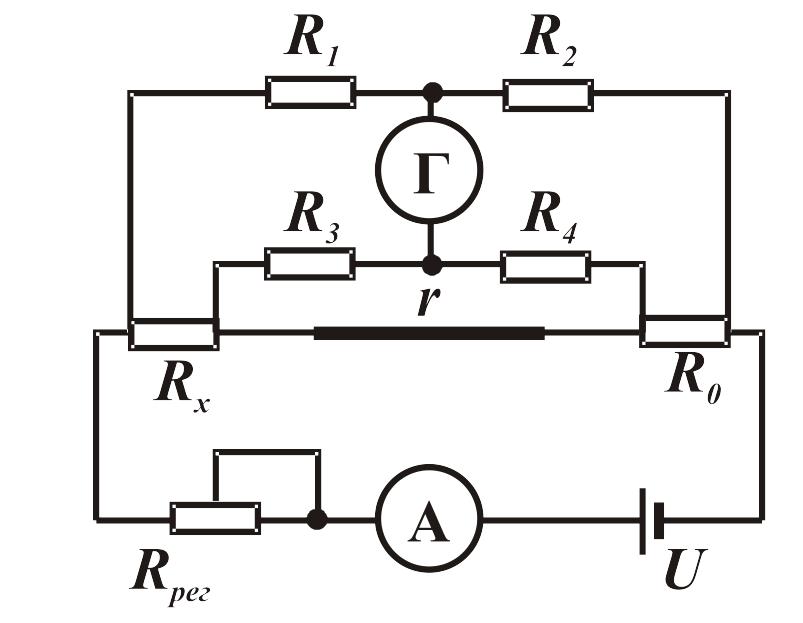
Рис.2.25. Схема двойного моста постоянного тока
При равновесии моста сопротивление Rх определяется выражением
![]() (2.31)
(2.31)
На практике значения R1, R2, R3, и R4 выбирают такими, чтобы выполнялось соотношение
R1/R2 = R3/R4 (2.32)
При этих условиях вторым членом в выражении (2.31) можно пренебречь. Чтобы проверить выполнение условия (2.32), мост уравновешивается, а затем проводник r убирается, что не должно влиять на равновесие моста. Следовательно, двойной мост компенсирует малое сопротивление r.
На практике для исключения влияния соединительных проводов сопротивление резисторов R1, R2, R3, и R4 выбирают больше 10 Ом, а сопротивления Rх и R0 имеют токовые и потенциальные зажимы и примерно один порядок величины. Чтобы исключить влияние термо-ЭДС, берут два отсчета при разных полярностях батареи, а затем усредняют результат.
Наиболее точные измерения сопротивлений R постоянному току выполняются с помощью мостов постоянного тока (МПТ)
В качестве нуль-индикаторов в мостах постоянного тока применяют высокочувствительные гальванометры или электронные устройства.
Двойной мост обеспечивает погрешность менее 0,05% для сопротивлений в диапазоне 10–6 …1 Ом.
Достоинства: широкое применение мостовых схем объясняется высокой точностью измерений, большой чувствительностью и возможностью измерения различных параметров электрических цепей (R, L, С), величин функционально с ними связанных (частота f, фазовый угол tg , добротность Q) и ряда неэлектрических величин – таких как температуры, давления, перемещений, усилий и др.
Применение: мосты широко используют для измерения сопротивления, индуктивности, емкости, добротности и угла потерь. На основе мостовых схем выпускают приборы для измерения неэлектрических величин (температуры, перемещений и др.) и различные устройства автоматики. Широкое применение мостов объясняется возможностью получения высокой точности результатов измерений, высокой чувствительности и возможностью измерения различных величин.

Рис. 2.26. Мост постоянного тока Р-333
Мост постоянного тока Р-ЗЗЗ (рис. 2.26) предназначен для:
· измерения электрического сопротивления по схеме одинарного моста;
· определения места повреждения кабеля посредством петли Варлея;
· определения места повреждения кабеля посредством петли Муррея;
· измерения асимметрии проводов;
· использования моста, как магазина сопротивлений.
Мосты предназначены для работы при температуре окружающего воздуха от 10 до 35°С и относительной влажности воздуха от 25 до 80%. Нормальная температура эксплуатации (20±5)°С при работе моста в классе 0,5; от 10 до 35°С при работе моста в классе 1,0; 5,0.
Измерение сопротивления, индуктивности и емкости выполняется одинарными мостами на переменном токе (рис. 2.27).

Рис 2.27. Схема моста переменного тока
Четыре плеча ab, bc, cd и da моста переменного тока образуются четырьмя комплексными сопротивлениями Z1= Zх, Z2, Z3 и Z4. В одну диагональ моста включается источник питания переменного тока, в другую – нулевой индикатор НИ. При равновесии моста ток в измерительной диагонали равен нулю и, следовательно, можно записать:
Z1Z3 = Z2 Z4, (2.33)
Представив комплексное сопротивление Z в (1.5) в алгебраической форме получим
(R1 + jX1) (R3 + jX3) = (R2 + jX2) (R4 + jX4),
откуда
![]() (2.34)
(2.34)
где Ri и Xi - активные и реактивные составляющие сопротивления Z.
Условие равновесия моста переменного тока можно записать в показательной форме:
![]()
![]() (2.35)
(2.35)
![]()
![]()
Здесь z – модули комплексов, а - аргументы. Далее получим:
![]()
откуда
![]() (2.36)
(2.36)
Оба уравнения равновесия совершенно равносильны и обязательны для достижения равновесия моста.
Из (2.36) следует, что для уравновешивания моста с комплексными сопротивлениями необходима регулировка активной и реактивной составляющих.
Равенство фаз (2.36) указывает, какими по характеру должны быть сопротивления плеч моста, что бы обеспечить равновесие мостовой схемы.
Например, если сопротивления плеч Z1 = R1, Z3 = R3, т.е. носят чисто активный характер, то φ1 = φ3 = 0.
Тогда из (1.8) следует
φ2 + φ4 = 0 или φ2 = ─ φ4 ,
а это означает, что если сопротивление Z2 индуктивного характера, т.е.
Z2 = R2 + jX2, то сопротивление Z4 должно носить емкостной характер, т.е. Z4 = R4 – jX4 (рис. 2.28,а). Аналогично получаем схемы сравнения между собой реактивных сопротивлений, содержащих индуктивности (рис. 2.28,б) и емкости (рис 2.28,в).
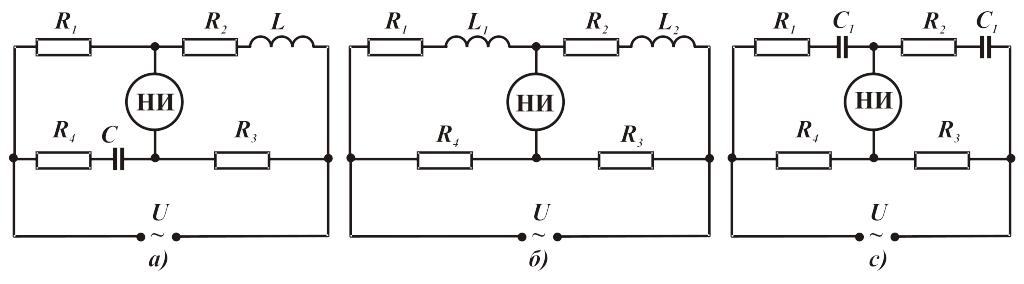
Рис. 2.28. Схемы мостов с реактивными сопротивлениями
а) в противоположных; б) и в) в смежных плечах
Правильный выбор регулируемых элементов моста и питание моста напряжением повышенной частоты (1000Гц и выше) обеспечивает быстрое равновесие моста или его хорошую сходимость.
Сходимость мостов ─ это возможность достижения состояния равновесия определенным числом переходов от регулировки одного параметра к регулировке другого. Хорошая сходимость обозначает малое число операций и, следовательно, сокращение времени измерения.
Погрешность мостов переменного тока складывается из следующих составляющих: погрешности выполнения отдельных элементов мостовой схемы, погрешности подгонки элементов, погрешности от неполного учета активной и реактивной составляющих сопротивлений плеч моста, погрешности отсчётного устройства.
Чем выше частота питания схемы моста, тем в большей степени проявляются эти погрешности. Для их уменьшения мост переменного тока питают от сети переменного тока через разделительный трансформатор, заземляют для уменьшения влияния паразитных емкостей и токов утечек, уменьшают влияние сопротивления соединительных проводов.
Существуют четыре класса точности мостов переменного тока: 0,05; 0,02; 0,1; 0,2. Нулевым индикатором на низкой частоте в них служит вибрационный гальванометр. При частоте 1000 Гц и выше питание осуществляется от звуковых генераторов, в качестве индикатора равновесия используются электронные нулевые индикаторы.

Рис. 2.29. Мост переменного тока Р5083.
Мост переменного тока Р5083 (рис. 2.29) предназначен для автоматического измерения: емкости (С); индуктивности (L); активного сопротивления (R) (добротности QR); тангенса угла потерь (tg δ); -тангенса угла сдвига (tg φ) (добротности Qc и QL) объектов измерений; -процентных отклонений объектов измерений от заданного значения с представлением результатов измерений в цифровом виде.
Мост может быть использован при контроле электро- и радиотехнических изделий, научных исследованиях и измерении неэлектрических величин путем использования измерительных преобразователей.
Мост обеспечивает:
автоматический выбор характера реактивности объекта измерений по критерию «превалирующий параметр»;
четырех зажимное подключение объекта измерения;
автоматический выбор схемы замещения;
учет начальных параметров;
усреднение результатов измерений;
устранение влияний сетевых помех;
измерение объектов удаленных на значительное расстояние от прибора;
измерение с десятикратным уменьшением значения напряжения переменного тока, подаваемого на объект измерения;
два режима измерения:
разовый - для измерения неизвестных величин,
следящий – для непрерывного измерения изменяющихся величин;
два вида запуска:
автоматический – с регулируемой в пределах от 0,1 до 99 с длительностью запуска;
ручной;
выполнение интерфейсных функций «Источник данных» (И), «Синхронизация передачи» (СИ), « Приемник данных» (П), « Синхронизация приема» (СП).
В качестве указателей равновесия в мостах переменного тока используются осциллографические индикаторы, вибрационные гальванометры, электронные нуль-индикаторы и др.
Важной характеристикой моста является его чувствительность. Под чувствительностью моста по току к изменению сопротивления понимают отношение отклонения указателя нулевого индикатора, вызванного изменением сопротивления какого-либо из плеч предварительно уравновешенного моста, к величине этого изменения Z , т.е.
![]() (2.37)
(2.37)
Практически чувствительность моста удобно характеризовать отношением к относительному изменению сопротивления, выраженному в процентах:
![]() (2.38)
(2.38)
где SM – чувствительность моста к относительному изменению сопротивления.
Мосты для измерения индуктивности добротности и взаимной индуктивности катушек
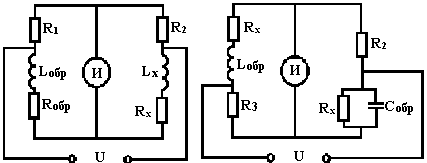
В мостовых схемах для измерения индуктивности в качестве сравнения может использоваться образцовая катушка индуктивности (рис. 2.30,а) или образцовый конденсатор (рис. 2.30,б). В первой схеме (рис. 2.30,а), кроме образцовой катушки с индуктивностью Lобр , используется дополнительный переменный резистор Rобр, регулировкой которого достигается баланс фаз.
Lx = R2 lобр/R1; Rx = R2Rобр/R1 (2.39)
а) б)
Рис. 2.30. Схема моста для измерения индуктивности и добротности катушек
В мостах переменного тока для измерения индуктивностей в качестве образцовой меры чаще применяется не катушка индуктивности, а конденсатор (рис. 2.30,б). В этом случае получаем следующие условия равновесия моста:
Lx = СобрR2 R3; Rx = R2R3/Rобр (2.40)
По полученным значениям Rх и Lх или R и С можно определить добротность катушки:
![]() (2.41)
(2.41)
При фиксированной емкости и фиксированной частоте напряжения питания моста шкалу переменного сопротивления можно градуировать в значениях Q.
Для измерения взаимной индуктивности двух катушек измеряют суммарную индуктивность катушек при их последовательном соединении и согласном (LC) и встречном (LВ) включении. Затем рассчитывают взаимную индуктивность по формуле:
![]() (2.42)
(2.42)
Уравновешивание схемы достигается плавной регулировкой параметров Rобр и Собр. Изменяя произведение R2 R3 можно расширять пределы измерения моста.
Мосты для измерения емкости и угла потерь конденсаторов
При измерении емкости исследуемого объекта, например, конденсатора, следует учесть, что он обычно обладает потерями, т.е. в нем поглощается активная мощность. Реальный конденсатор представляется эквивалентной схемой в виде реальной емкости, параллельно или последовательно соединенной с активным сопротивлением, обуславливающим возникновение эквивалентных потерь. Последовательная схема в большой степени отвечает случаю, если потери в диэлектрике незначительные; при больших потерях в диэлектрике применяют параллельную схему замещения. В связи с этим для измерения ёмкости и угла потерь конденсаторов с малыми потерями используют мостовую схему, изображенную на рис.2.31,а, а с большими - на рис.2.31,б. В первом случае измеряемый конденсатор представлен в виде последовательного соединения емкости Сx и сопротивления потерь Rx и условие равновесия имеет вид:
Rx = R3R2/R4; Cx = C3R4/R2 (2.43)
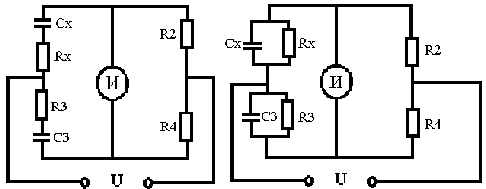
а) б)
Рис. 2.31. Схема моста для измерения емкости и угла потерь
Тангенс угла потерь для конденсаторов с последовательной схемой замещения определяется по формуле:
![]() (2.44)
(2.44)
где ω – угловая частота напряжения питания.
Для схемы при параллельном соединении условие равновесия запишется в виде:
Rx = R3R4/R2; Cx = C3R2/R4 (2.45)
Тангенс угла потерь при параллельной схеме замещения определяется выражением:
![]() (2.46)
(2.46)
Уравновешивание этих схем производится поочередным изменением сопротивления R3 и емкости C3. Для расширения пределов изменения измеряют отношение R2/R4 (или R4/R2).
Универсальные мосты для измерения сопротивления, ёмкости, угла потерь, индуктивности и добротности.
Для измерений в лабораторных условиях промышленность выпускает универсальные мосты, позволяющие осуществлять измерения сопротивлений на постоянном токе, емкости и угла потерь, индуктивности и добротности на переменном токе.
Современные универсальные мосты содержат набор образцовых резисторов, конденсаторов и катушек индуктивностей постоянного и переменного значения.
Универсальные мосты предназначаются для измерения сопротивлений в широких пределах, емкости – от десятков пикофарад до сто микрофарад, tg δ – от десятичных долей до одной десятой, индуктивности – от единиц микрогенри до сотен генри и добротности – от единиц до нескольких сотен. Погрешность универсальных мостов зависит от измеряемой величины. Измерения параметров и катушек индуктивности в универсальных мостах обычно производится на частоте 1000 Гц.
Трансформаторные измерительные мосты для измерения комплексных сопротивлений.
Достоинством трансформаторных измерительных мостов является то, что они могут обеспечить практически постоянную чувствительность в широком диапазоне частот ( до сотен мегагерц) и позволяют производить измерения с незначительной погрешностью (в некоторых случаях до 0,01 – 0,001 %) . Следует отменить возможность применения трансформаторных мостов для измерения неэлектрических величин ( уровней, влажности, перемещений и т.п.).