

Лабораторная работа № 3 исследование качества сар и корректирующих элементов сар
Цели работы:
• освоить отдельные понятия и вопросы теории автоматического регулирования (корректирующие элементы, структурно-неустойчивые системы, жесткие и гибкие обратные связи в качестве корректирующих элементов, введение в закон регулирования производных и интегралов, применение астатических звеньев в качестве корректирующих элементов);
• закрепить навыки работы с ПК «МВТУ».
Теоретический материал, необходимый для выполнения работы. Следует знать принципы и методику моделирования САР с помощью ПК «МВТУ», а также понятия коррекции САР и законы регулирования.
Последовательность выполнения работы:
• ознакомиться с теоретическими сведениями по качеству регулирования САР;
выполнить моделирование САР напряжения синхронного генератора (см. рис.1) на основе подготовленных исходных данных (по данным предыдущей работы); в процессе моделирования определить критический коэффициент усиления k1 электронного усилителя (УО1);
задать коэффициент усиления k1, на 10... 15 % превышающий его критическое значение, и для неустойчивого режима САР достичь стабилизации системы с использованием отдельных вариантов коррекции (по заданию преподавателя), рассмотренных ниже.

Рисунок 1 – Схема САР напряжения синхронного генератора
Теоритические сведения
Известно, что качество САР следует оценивать отдельно по задающему и возмущающему воздействиям. При этом показатели качества должны отвечать заданным требованиям. Оценку качества САР с помощью компьютерного моделирования целесообразно проводить по графикам переходных процессов при ступенчатых входных воздействиях (переходным функциям). При этом сначала можно получить переходную функцию по задающему воздействию, приняв возмущающее воздействие равным нулю, а затем — переходную функцию по возмущению, приняв задающее воздействие равным нулю. Значение задающего воздействия рассчитывают с учетом коэффициента статизма kСТ , а значение ступенчатого воздействия — с учетом возможных максимальных значений внешних возмущений.
Рассмотрим методику и последовательность оценки качества САР по переходным функциям на примере системы стабилизации температуры в инкубаторе.
![]()
![]()
где W U0 (0) — значение передаточной функции системы по задающему воздействию при р = 0.
Возмущающее воздействие — температура атмосферы, окружающей инкубатор, будет определяться ее возможными минимальными значениями, зависящими от времени года.
Допустим, что в процессе компьютерного моделирования рассматриваемой САР получен график переходной функции по задающему воздействию при Θ0=0(рис. 2).
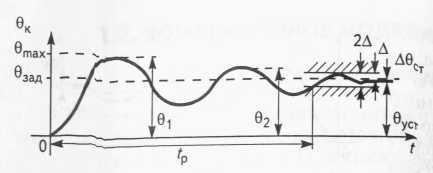
Рис. 2. Переходная функция САР по задающему воздействию
Переходный процесс САР будут характеризовать следующие показатели качества:
• установившееся статическое отклонение (статическая ошибка) - отклонение регулируемой величины от заданного значения после окончания переходного процесса: ΔΘ=Θзад - Θуст
• время регулирования tp, в течение которого отклонение регулируемой величины станет меньше заранее заданного значения, определяемого требуемой точностью системы Δ;
• перерегулирование (колебательность), определяемое разностью максимального значения регулируемой величины и ее значения в установившемся режиме, %:
![]()
• число перерегулирований п, т. е. число максимальных значении за время регулирований; для функции, изображенной на рисунке 1, п = 2;
![]()
![]()
•логарифмический декремент затухания, характеризующий скорость затухания переходного процесса:
Следует отметить, что статическую ошибку по задающему воздействию можно полностью компенсировать за счет соответствующего выбора задающего воздействия с учетом формулы (*). Это значит, что при достаточной точности вычислений по формуле (*)
![]()
В данном случае график переходной функций САР по возмущению при U0 = Uв отклонениях регулируемой величины от заданного значения будет иметь вид, показанный на рисунке 3: при t=0 величина имеет заданное значение Θзад.
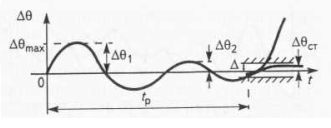
Рис. 3. Переходная функция САР по возмущающему воздействию
Согласно этому графику показатели качества САР по возмущению следующие:
• статическая ошибка ΔΘзад ;
• время регулирования tр;
• перерегулирование (верхние математические знаки для положительных значений ΔΘзад нижние - для отрицательных значений)
![]()
• число перерегулирований п = 2;
• логарифмический декремент затухания.
Рассмотренные показатели качества применимы для колебательных переходных процессов. При монотонных переходных функциях (рис. 4) качество САР характеризуется статической ошибкой ΔΘСТ и временем регулирования tр .
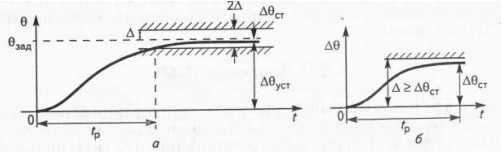
Рис. 4. Монотонные переходные функции (процессы) САР:
а — по задающему воздействию при Θ0= 0; б — по возмущающему воздействию при U0 = 0
Переходные функции по задающему и возмущающему воздействиям при компьютерном моделировании можно получить в виде одного совмещенного графика (рис. 5). При этом сначала прикладывают ступенчатое задающее воздействие, а возмущение подают в виде смещенной ступенчатой функции (рис. 6).
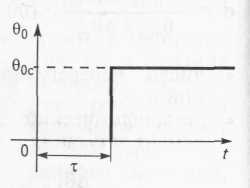
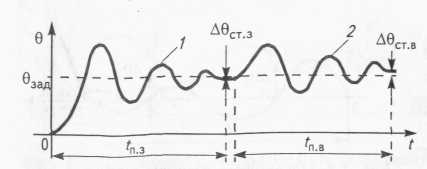
Рис. 5. Совмещенный график переходных Рис. 6. Смещенное ступенчатое возмущение
процессов САР
1 — по задающему воздействию; 2 — по возмущению;
tпз — время переходного процесса от задающего воздействия;
tnв — время переходного процесса от возмущения.
где τ — время, удовлетворяющее условию τ > tпз(здесь tпз — время затухания переходного процесса по задающему воздействию); Θ0с — значение ступенчатого воздействия.
К рассмотренным показателям качества предъявляют следующие конкретные требования с учетом регламентированной точности регулируемой величины.
Статическая ошибка определяется требуемой точностью к поддержанию регулируемой величины. Так, для САР температуры в инкубаторе погрешность стабилизации температуры должна быть не более ±0,2 0С. Следовательно, статическая ошибка ΔΘСТ < |0,2| °С. Применительно к системе стабилизации температуры в животноводческом помещении (для содержания крупного рогатого скота) погрешность поддержания температуры допускается на порядок больше по сравнению с требованиями к температуре в инкубационной камере. Следовательно, и допустимая статическая ошибка для такой системы может быть на порядок больше, т е.
ΔΘст<|1,5...2|°С.
Значение заданной величины Δ, определяющей длительность времени регулирования tp, обычно принимают ориентировочно не более 5 % заданного значения регулируемой величины. Величину ±Δ в автоматике условно называют «трубкой».
Перерегулирование а не должно превышать 20 %, а число перерегулирований п < 2...3.
Что касается логарифмического декремента затухания, то к нему нет определенных требований. Его можно использовать для сравнительной оценки быстродействия различных вариантов САР (чем больше декремент затухания, тем выше быстродействие системы и как косвенный показатель при синтезе систем с максимальным быстродействием.