

5.3.Работы №3,4 «Управление электродвигателями»
Для выполнения данной работы в отладочную материнскую плату вставляется дочерняя плата управления электродвигателями, блок схема которой представлена на рисунке 5.6.

Рис. 5.15 Плата электропривода.
На этой плате реализован четырехфазный инвертор напряжения и преобразователь сигналов оптического энкодера, используемого в качестве датчика положения вала двигателя.
Сигналы управления ключами инвертороа подключены к выводам портов P1.5-P1.7, P2.0-P2.4 микроконтроллера. Открытому состоянию транзисторного ключа соответствует логический «0» на вводе соответствующего порта.
Преобразователь сигналов оптического энкодера связан с микроконтроллером посредством стандартного интерфейса SPI.
Интерфейс энкодера состоит из 6 линий:
RSTN (подключен к выводу порта P0.6) – сброс преобразователя энкодера в начальное состояние по нулевому уровню сигнала;
INDEX_OK (подключен к выводу порта P0.7) – логическая единица на этом выводе появляется, когда преобразователь находит нулевую метку и начинает выдавать правильное абсолютное угловое положение;
L_H (подключен к выводу порта P1.0) – выбор передаваемого байта положения (высокий логический уровень – старший байт, низкий логический уровень – младший байт);
SCK (подключен к выводу порта P1.1) – линия тактовых импульсов синхронизации SPI;
MISO (подключен к выводу порта P1.2) – линия данных шины SPI;
NSS (подключен к выводу порта P1.4) – линия выбора устройства шины SPI.
Код угла имеет разрядность 10 бит, т.е. 1024 значения на один полный оборот вала двигателя. Так как SPI производит обмен только по 8 бит за одну посылку, то код положения передается за два прохода. В зависимости от уровня на L_H, микросхема преобразователя передает либо младшие, либо старшие 8 бит кода, но из посылки старшего байта информацию несут только младшие 2 бита (см. рис 5.7). Начинать чтение данных необходимо всегда с младшего байта.
|
|
|
|
|
|
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
старший байт (L_H=1) |
младший байт (L_H=0) |
||||||||||||||
Рис. 5.16 Формат данных с преобразователя угол-код.
Для управления двигателем постоянного тока используются два плеча инвертора (в примере на рис.5.8 это плечи X и W), в диагональ которых включен якорь двигателя. Для того, чтобы двигатель вращался в одну сторону, к его якорю должно быть приложено напряжение через открытые транзисторы VT1 и VT4. Транзисторы VT2 и VT3 в этом случае должны быть закрыты для исключения сквозных токов. Для вращения двигателя в противоположном направлении, должны быть открыты транзисторы VT2 и VT3, а VT1 и VT4 закрыты. При этом к якорю двигателя прикладывается отрицательное напряжение. Регулировать скорость вращения вала двигателя можно, изменяя среднее значение напряжения на якоре двигателя, что осуществляется с помощью широтно-импульсной модуляции сигнала управления одного или обоих ключей открытой диагонали.

Рис. 5.17 Схема подключения ДПТ.
При управлении двухфазным шаговым двигателем используются все четыре плеча инвертора. При этом положение ротора определяется направлением протекания тока по каждой из обмоток. Схема подключения обмоток шагового двигателя к плате представлена на рис. 5.9.
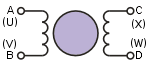
Рис. 5.18 Схема подключения шагового двигателя.
Существует несколько способов управления шаговым двигателем. Основные из них представлены на рис. 5.10.
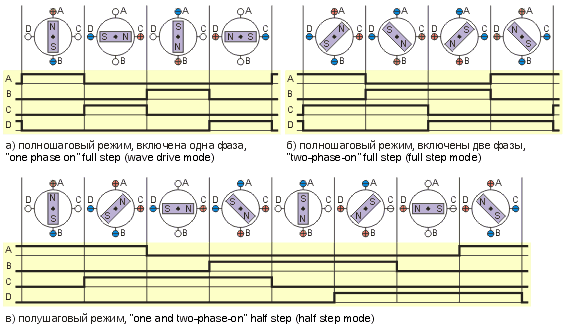
Рис. 5.19 Способы управления шаговым двигателем.
1) Попеременная коммутация фаз (одновременно включена только одна фаза).
Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у двигателя с незапитанными фазами.
2) Управление фазами с перекрытием (одновременно включены две фазы).
При этом способе управления ротор фиксируется в промежуточных позициях между полюсами статора и обеспечивается примерно на 40% больший момент, чем в случае одной включенной фазы. Этот способ управления обеспечивает такой же угол шага, как и первый способ, но положение точек равновесия ротора смещено на полшага.
3) Полушаговый режим (каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две). В результате угловое перемещение ротора составляет половину угла шага для первых двух способов управления.