

4.2.Пример работы с платой и ide.
В качестве примера приведем простейшую программу мигания светодиодом. Исходный код находится по следующему пути: «C:\SiLabs\MCU\Examples\C8051F36x\Blinky\F36x_Blinky.asm».
Скопируйте его в свой проект.

Рис. 4.8 Основное окно с загруженным проектом.
Данная программа – простейший пример программирования. Она управляет выводом порта (в данном случае P2.7), который подключается к светодиоду с помощью матрицы коммутации. Для соединения служит перемычка. В данном случае необходимо соединить гнездо P2.7 с гнездом LED3 для мигания третьим светодиодом (рис. 4.8).

Рис. 4.9 Матрица коммутации.
Листинг программы нужно скомпилировать, загрузить в плату, запустить и наблюдать за результатами работы программы.
Листинг программы с краткими объяснениями:
$NOMOD51
$include (c8051f360.inc) ;Подключаем заголовочный файл, в котором
;определяются регистры МК.
;------------------------------------------------------------------------------
; EQUATES
;------------------------------------------------------------------------------
GREEN_LED equ P2.7 ;Вывод P2.7 сопоставляется имени
;GREEN_LED
;------------------------------------------------------------------------------
; RESET and INTERRUPT VECTORS
;------------------------------------------------------------------------------
; Reset Vector
cseg AT 0
ljmp Main ;Сегмент кода начинается с прыжка на метку Main
;------------------------------------------------------------------------------
; CODE SEGMENT
;------------------------------------------------------------------------------
Blink segment CODE
rseg Blink ;Выбор регистрового банка 0, который используется
using 0 ;в основной программе
Main:
;Отключение сторожевого таймера
anl PCA0MD, #NOT(040h) ;Очистка Watchdog Enable bit
;Переключение на SFR-страницу Configuration Page
mov SFRPAGE, #CONFIG_PAGE
;Включение коммутационной матрицы портов ввода/вывода
mov XBR1, #40h ;Включение матрицы
orl P3MDOUT, #04h ;Перевод выхода на светодиод в режим
;push-pull
; Сброс светодиода
clr GREEN_LED
;Простой цикл задержки
Loop2: mov R7, #03h
Loop1: mov R6, #00h
Loop0: mov R5, #00h
djnz R5, $
djnz R6, Loop0
djnz R7, Loop1
cpl GREEN_LED ;Переключение светодиода
jmp Loop2
;------------------------------------------------------------------------------
; End of file.
END
Приступаем к отладке программы. Основные способы отладки это выполнение программы в пошаговом режиме и расстановка точек останова.
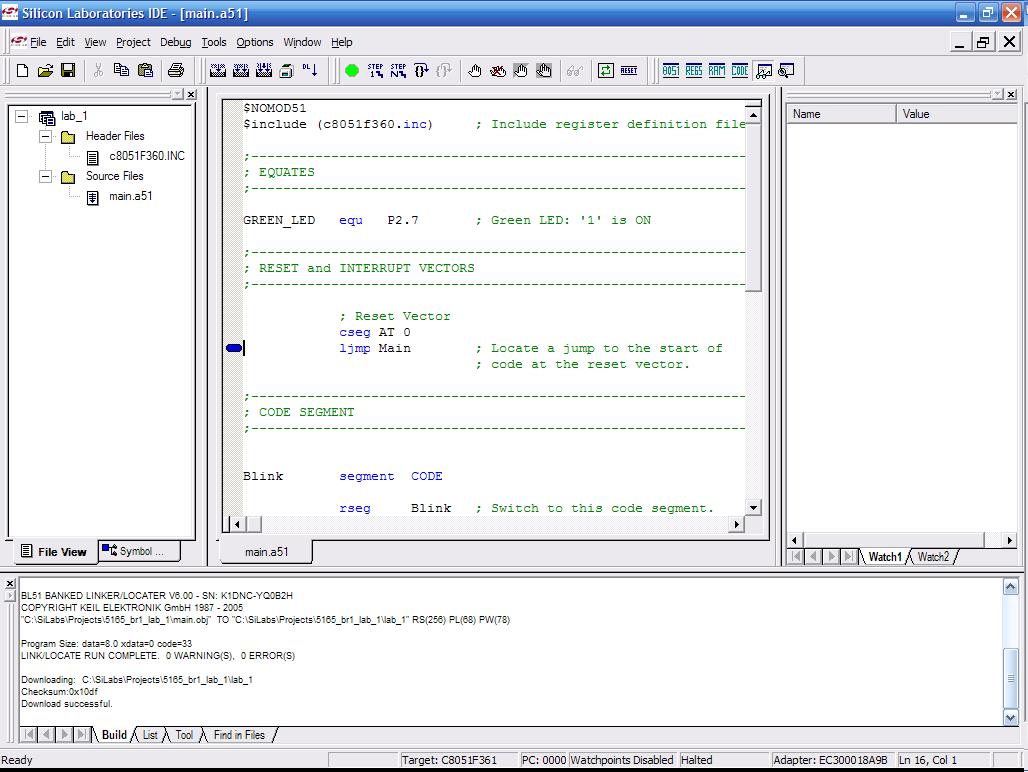
Рис. 4.10 Метка напротив текущей команды.
После компиляции и загрузки программы в МК, в главном окне появляется синяя метка (рис. 4.9) напротив той строки кода, с которой начнется выполнение программы. Естественно, что после остановки программы (красной кнопкой Stop)метка переместится в другое место, т.к. остановка произойдет в случайное время.
При
пошаговой отладке кнопками
![]() синяя метка будет смещаться по строчкам
с операндами, отмечая текущую команду,
которая будет выполнена далее.
синяя метка будет смещаться по строчкам
с операндами, отмечая текущую команду,
которая будет выполнена далее.