

6.6.Аналогово-цифровой преобразователь
В состав модуля АЦП0 в МК C8051F360/1/2/6/7/8/9 входят: два аналоговых мультиплексора (обозначаемые далее как AMUX0) с 23 внешними входами на каждом, собственно 10-разрядный АЦП последовательного приближения (максимальная производительность − 200 тыс. преобразований в секунду) с интегрированным устройством выборки/хранения и программируемый детектор диапазона. Настройка AMUX0 и детектора диапазона, а также выбор режимов преобразования данных осуществляются полностью программно с помощью регистров специального назначения, показанных на рисунке 6.6.1. АЦП0 поддерживает как однофазный, так и дифференциальный режимы работы, и может быть настроен для измерения напряжения на портах P1.0 – P3.4 (если они доступны), выходного сигнала датчика температуры или напряжения питания VDD относительно любого из портов P1.0 – P3.4, VREF или GND. АЦП0 включен, когда бит AD0EN в регистре управления ADC0CN установлен в 1. АЦП0 отключен (переведен в режим пониженного энергопотребления), когда бит AD0EN сброшен в 0.
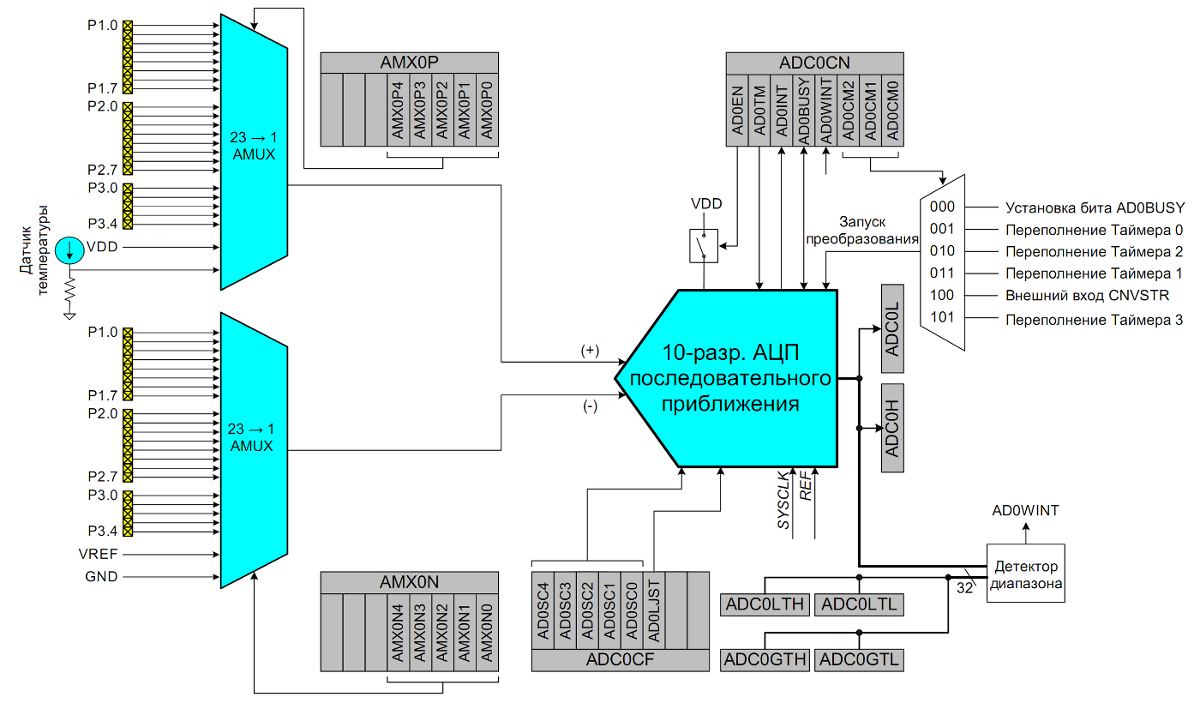
Рис 6.6.1 Функциональная схема АЦП0.
6.6.1.Аналоговый мультиплексор
AMUX0 осуществляет выбор положительного и отрицательного входов АЦП.
В качестве положительного входа можно выбрать:
- внешние порты ввода/вывода;
- выходной сигнал встроенного датчика температуры;
- положительное напряжение питания (VDD).
В качестве отрицательного входа можно выбрать:
- внешние порты ввода/вывода;
- VREF;
- общий вывод питания GND.
Если в качестве отрицательного входа выбран GND, то АЦП0 функционирует в однофазном режиме; во всех остальных случаях АЦП0 функционирует в дифференциальном режиме. Входные каналы АЦП0 выбираются в регистрах AMX0P и AMX0N (см. SFR-описания 6.6.1 и 6.6.2).
Формат получаемого результата преобразования различен для однофазного и дифференциального режимов. По окончании каждого преобразования в регистры ADC0H и ADC0L записываются соответственно старший и младший байты результата преобразования. Данные могут быть выровнены вправо или влево в зависимости от значения бита AD0LJST (ADC0CF.2). В однофазном режиме результаты преобразований представлены в виде 10-разрядных целых чисел без знака. Диапазон измерения входных напряжений: 0 … VREF×1023/1024. Ниже приведены примеры результатов преобразований при выравнивании как вправо, так и влево. Неиспользуемые биты в регистрах ADC0H и ADC0L установлены в ‘0’.
Входное напряжение (однофазный режим) |
ADC0H:ADC0L с выравниванием вправо (AD0LJST=0) |
ADC0H:ADC0L с выравниванием влево (AD0LJST=1) |
VREF×1023/1024 |
0x03FF |
0xFFC0 |
VREF×512/1024 |
0x0200 |
0x8000 |
VREF×256/1024 |
0x0100 |
0x4000 |
0 |
0x0000 |
0x0000 |
В дифференциальном режиме результаты преобразований представлены в виде 10-разрядных чисел в дополнительном коде со знаком. Диапазон измерения входных напряжений: −VREF … VREF×511/512. Ниже приведены примеры результатов преобразований при выравнивании как вправо, так и влево. При выравнивании вправо неиспользуемые старшие разряды регистра ADC0H являются знаковым расширением слова данных. При выравнивании влево неиспользуемые младшие разряды регистра ADC0L установлены в ‘0’.
Входное напряжение (дифференциальный режим) |
ADC0H:ADC0L с выравниванием вправо (AD0LJST=0) |
ADC0H:ADC0L с выравниванием влево (AD0LJST=1) |
VREF×511/512 |
0x01FF |
0x7FC0 |
VREF×256/512 |
0x0100 |
0x4000 |
0 |
0x0000 |
0x0000 |
−VREF×256/512 |
0xFF00 |
0xC000 |
−VREF |
0xFE00 |
0x8000 |
Важное примечание относительно конфигурации входов АЦП0: Выводы порта, выбранные в качестве входов АЦП0, должны быть настроены как аналоговые входы и должны пропускаться матрицей при назначении выводов. Чтобы настроить вывод порта как аналоговый вход, следует сбросить в 0 соответствующий бит в регистре PnMDIN (для n = 0,1,2,3). Чтобы заставить матрицу пропускать вывод порта при назначении выводов, следует установить в 1 соответствующий бит в регистре PnSKIP (для n = 0,1,2,3). Более подробная информация о настройке портов ввода/вывода приведена в разделе «Порты ввода/вывода».