

Математическая модель функций информационно-управляющих систем
Анализ производства показал, что наиболее точной моделью является 2-х уровневая иерархическая модель производства. Здесь на нижнем уровне – локальные функции управления и на верхнем уровне – централизованные функции управления.
Достоинства:
на нижнем уровне информация достоверна и наиболее полная, а управление им верхним уровнем позволяет оптимизировать эту информацию;
каждая локальная информация хранится по месту назначения, сохраняя надежность и вместе с тем доступна всем остальным участникам процесса;
надежность всей системы не зависит от надежности конкретной информации, хотя эта информация обладает высокой пропускной способностью в системе.
надежность в локальной информации высока, так как она связана с надежностью конкретного локального оборудования и не зависит от надежностей связей.
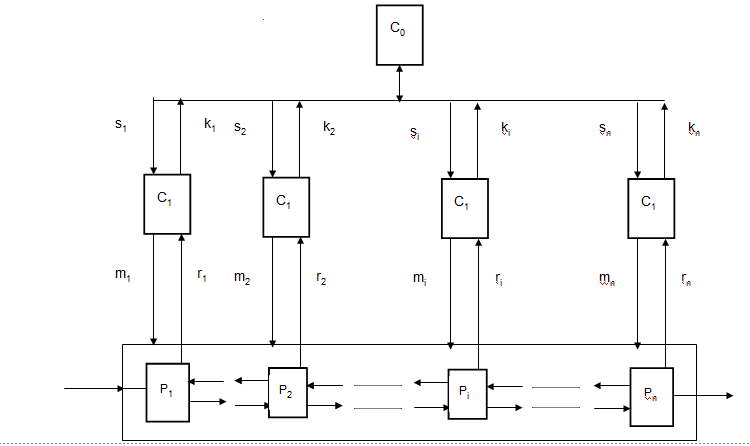
Рисунок 3. Централизованная структура с автономным управлением
На рисунке 3 приняты обозначения:
Co-система управления верхнего уровня;
Сn-система управления нижнего уровня;
![]() управляемые
процессы
управляемые
процессы
m![]() M-сигналы
управления
M-сигналы
управления
![]()
![]() -
сигналы возмущения
-
сигналы возмущения
r R-информационные системы 1-го уровня
s S-координирующий сигнал
у У- выходные сигналы
к К- информационные сигналы 2-го уровня.
Тогда уравнения, отражающие модель функционирования информационной подсистемы будут следующими:
Процесс управления отражается моделью
P: M ´W®U,
Вследствие действия управляющего сигнала M с учетом возмущающих факторов, приводящих к изменению выходной величины У.
Процесс управления 1-го локального уровня выражается функцией
Ci: S´Ri® Mi ; R = R1´R2´ … ´Rn .
За счет координирующих сигналов информационных потоков 1-го уровня формируется сигнал управления М.. Информационный поток формируется по каждому процессу.
Модель функции координации
C0: K ® S
На уровне координации сигнал S формируется за счет информационных потоков 2-го уровня.
Функции отображения 1-го и 2-го уровня
fi: Mi ´ W ´ U ® Ri ; i = 1, 2, … , n ; ( А )
fo: S ´ R ´ M ® K . ( Б )
Формулы ( А ) и ( Б ) отражают функции информационных систем в формальном виде, изменение управляющих, возмущающих и координирующих сигналов приводит к изменению информационных потоков.
Лекция № 2 Управление в сложных технических системах. Классы современных подсистем асутп. Понятие “интегратор”. Функции птк “интегратор”. Требования к архитектуре. Типы интеграторов.
На рынке имеются:
- устаревшие системы без должного унифицированного решения, в которых отсутствуют единые технические решения;
- современные по времени, но отсталые технологически;
- современные системы, созданные на территории СНГ;
- Системы под “ключ” от мировых лидеров автоматизации.
Рынок производства по автоматизации диктовал необходимость создания единого подхода к техническим решениям: унификация оборудования, контроллеров, оборудования, программного обеспечения, унификация интерфейсов и их общая интеграция.
Интегратор- это программно-технический комплекс, который выполняет все функции по взаимодействию различных подсистем. Причем функция подстраивания как раз лежит на интеграторе, что освобождает от необходимости изменять уже существующие подситемы.