

Объект не содержит интегратора. Используется 2-х позиционный релейный регулятор с гистерезисом. Процес регулирования будет колебательным.
Объект содержит интегратор. Релейный элемент трех позиционный с гистерезисом. Происходит автоколебания. Если управляемый сигнал ограничен объект не содержит ограничения
![]()

Во всех других случаях реальное импульсное управление не доступно. Тогда используется непрерывное регулирование , так что пропорциональна составляющая ликвидирует ошибку регулирования. Интегральная составляющая ликвидирует ошибку из произвольного времени.
![]()
Т95-это время при коктором достигается 95% уст.знач.Метод Циглера-Никольса основан на том что система в непропорциональном варианте раскачивают до автоколебания Тк - это период автоколебании на границе устойчивости
Т95≈3*Т0

Т95≈τ+3*Т0
Если параметры объекта Т0 и τ0 трудно определить, то Тк принимается за 0,1*Ткр , где Ткр –период автоколебаний.(Период колебаний на границе усточивости ОУ)
Показатели регулирования:
Перерегулирование
Статическая ошибка регулирования
Динамическая ошибка регулирования
Время переходного процесса
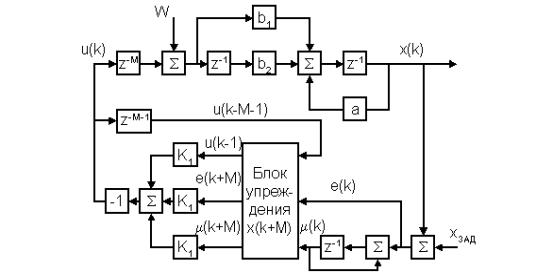
Лекция 8. Модальные цифровые регуляторы для объектов с запаздыванием
Модальные цифровые регуляторы реализуют наиболее совершенную структуру астатического регулятора состояния. Для компенсации запаздывания в эту структуру вводится определитель выходных сигналов объекта управления. Использование теории модального цифрового управления позволяет существенно упростить расчет параметров астатического регулятора состояния.
Методы настройки регуляторов
Частотные способы настройки;
Инженерные методы настройки;
Настройка методом Циглера –Николса
Инженерный метод расчета разработан эмпирическим путем. Разработан Всесоюзным электротехническим институтом измерений.
Параметры настройки |
Формулы для регуляторов |
Характеристика объекта |
||
П |
ПИ |
ПИД |
||
δ=1/kp Tи TD |
εобτоб - |
1,1εобτоб 3,3εобτоб
|
0,8εобτоб 2,5τоб τоб |
0< τоб/Tоб<0,2 |
δ=1/kp
Tи TD
|
2,6kоб(τоб/Tоб-0,08)/ (τоб/Tоб+0,6)
|
3,7 kоб(τоб/Tоб-0,13)/ (τоб/Tоб+1,5) Tоб τоб |
0,2< τоб/Tоб<1,5 |
|
- |
0,8Tоб |
|||
δ=1/kp Tи TD
|
2kоб - |
2kоб 0,6τоб |
1,7kоб 0,7τоб τоб
|
τоб/Tоб>1,5 |
Здесь εоб= kоб/ Tоб
Следующие формулы демонстрируют ещё один подход к решению инженерных задач:
Для
![]()

Для
![]()
Для
![]()

Для
![]()

Тип регулятора |
KP |
Tи |
Tд |
P |
0,5 KKR |
– |
– |
PI |
0,4 KKR |
0,85 TK |
– |
PID |
0,6 KKR |
0,5 TK |
0,12 TK |
Метод Циглера-Николса
Основан на том что пропорциональная часть проводит систему к автоколебаниям. Метод позволяет определить границы автоколебаний.
1) Устойчивость пропорционального регулятора Кп=Кпмах,Ти=бесконеч.Тд=0.
2)Включение Обратной связи в систему и наблюдение за выходной переходной характеристикой
3)Если расходящиеся колебания, уменьшить коэффициент пропорциональности, пока не будут автоколебания с одинаковой амплитудой.
4)если затухающие автоколебания, то увеличить коэффициент пропорциональности.
5) фиксировать критические значения коэффициентов
Типовой алгоритм релейно- импульсного регулятора фирмы Siemens.

Из представленной схемы видно, что на продолжительность импульса влияет зона возврата и постоянная времени интегрирования в ФОС.
На время периода влияет величина зоны нечувствительности РЭ и скорость наростания ФОС(постоянная времени интегрирования)
В типовом алгоритме непрерывного аналогового регулятора фирмы SIEMENS объединены несколько функций:
Нормирование входного сигнала
Реализация импульсного регулирования
Контроль и сигнализирование предельных значений
Нормирование выходных сигналов
Формула нормирования У=Умин+Кн*(х-хмин).кн=умин-умах/хмах-хмин.
Вход формальной переменной ,сигнал рассогласовании, мертвая зона, зона не чувствительности, релейный элемент, увеличениеGain. Интегратор в зависимости от сигнала ошибки, рассогласования будет работать в верхней или нижней части релейного элемента.

Типовой алгоритм непрерывного аналогового регулятора фирмыSiemens.
