

Лекция 7. Цифровые регуляторы. Алгоритмы цифрового пид регулирования. Импульсные цифровые регуляторы. Модальные цифровые регуляторы для объектов с запаздыванием.
Для того, чтобы правильно вывести функцию регулятора необходимо ограничить задачу регулирования
Начнем с типизации воздействия на объект:

1) Ступенчатое единичное
воздействие
2) Линейно-нарастающее
воздействие
3) Воздействие в виде параболы, синусоиды,
эллипса или другого вида уравнения
второго порядка

4) Стохастическое
воздействие

Типовые характеристики объектов
Статические объекты, это объекты которые при подаче на них ступенчатого входного сигнала выходной сигнал устанавливается одновременно со стабилизацией входного сигнала. Эти объекты описываются линейными уравнениями.
Астатические объекты первого порядка, это объекты которые при подаче на них ступенчатого входного сигнала выходной сигнал изменяется линейно. Эти объекты описываются дифференциальными уравнениями первого порядка
Астатические объекты второго порядка, это объекты которые при подаче на них ступенчатого входного сигнала выходной сигнал изменяется нелинейно. Эти объекты описываются дифференциальными уравнениями второго порядка
Типовые объекты управления:
Инерционный объект 1 –го порядка;
Инерционный объект 2-го порядка с запаздыванием;
Интегральный объект первого порядка с запаздыванием;
Объект второго порядка как колебательное звено;
Типовые законы регулирования :
Непрерывный ПИД – закон регулирования;
Импульсный ПИД- закон регулирования;
Двухпозиционное импульсное (релейное) регулирование;
Трехпозиционное импульсное (релейное) регулирование.
Достоинствами релейного регулирования являются
Быстродействие и простота
Недостатками релейного регулирования являются
Вероятность автоколебании
Непрерывный закон ПИД –регулирования
80% регулирования осуществляется непрерывным ПИД регулированием
![]()
![]() , где
, где
![]() -
сигнал рассогласования
-
сигнал рассогласования
В настоявшее время в качестве регулятора используется цифровое устройство. Задачей программиста является регулирования непрерывного ПИД-закона. Однако цифровое устройство любой непрерывный сигнал выдает дискретно.
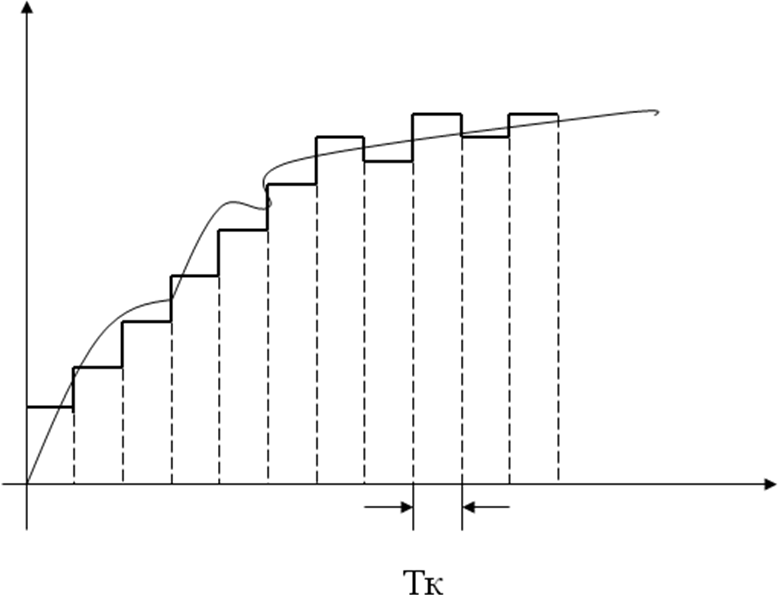
Тк –период квантования
Для представления непрерывного сигнала в устройствах используется понятие конечных разностей. Каждое новое значение непрерывного сигнала представляется сравнением его с предыдущими значениями.
![]()
Тогда заменив непрерывное время Т на дискретное время к Тк получим уравнение

k=1,2,3...
Уравнение в приращениях управляющего сигнала

Уравнение в приращениях управляющего сигнала
![]()
![]()
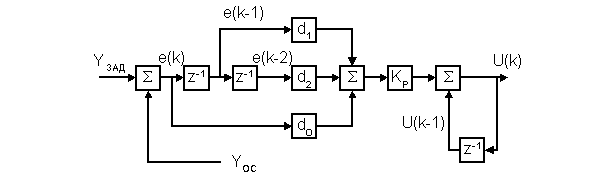
Структурная схема алгоритма цифрового ПИД регулирования.
Релейные регулирования используются в двух случаях: