

4.2 Нагрузки на опорные узлы
Нагрузку на опорные узлы определяют при подъеме номинального груза и наибольшем его вылете L.
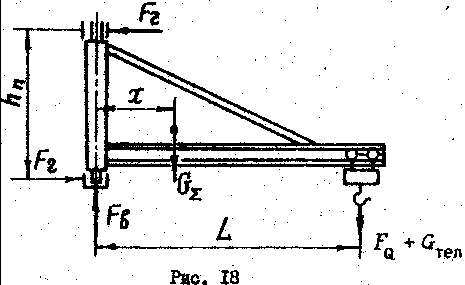
Кран с внешней верхней опорой и переменным вылетом (рис.18)
Вертикальная нагрузка
Fв=FQ+G0+Gтел
Горизонтальная нагрузка
Fг=((FQ+G0)L+G0x)/hn
определение hn дано в [1].
При постоянном вылете тележку не используют, и вес механизма подъема входит в общий вес крана G0/
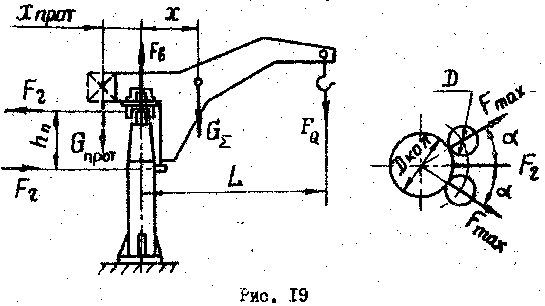 Кран
с неподвижной колонной и постоянным
вылетом (рис. 19).
Кран
с неподвижной колонной и постоянным
вылетом (рис. 19).
Вертикальная нагрузка
Fв=FQ+G0+Gпрот
Горизонтальная нагрузка:
без противовеса
Fг=(FQL+G0x)/hn
с противовесом
Fг=FQL/2hn
Наибольшая нагрузка на ролик
Fmax=Fг/2cosα
При использовании ручного привода обычно принимают α=300; при использовании механического привода, расположенного вблизи опорного узла, применяют, как правило, четыре ролика, размещенных через 900.
При переменном вылете груза расчет нагрузок аналогичен расчету их для крана с внешней верхней опорой и переменным вылетом.
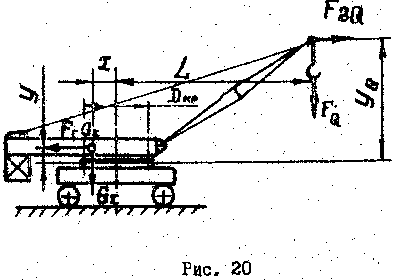 Кран
на поворотной платформе (рис. 20)
Кран
на поворотной платформе (рис. 20)
Вертикальная нагрузка
Fв=FQ+G0
Горизонтальная нагрузка от центробежных сил
Fг=FгQ-FгG0=(π·nкр/30)2(FQL-G0x)/g
Здесь предполагается, что вес противовеса влючен в общий вес крана G0 и учтен при определении координат центра тяжести поворотной части крана х и у. При положении противовеса ниже плоскости поворотного абсцисса х может быть положительной.
Момент, выворачивающий опорно-поворотный круг,
M=FQL+G0x+(πnкр/30)2·(FQ·L·yQ+G0x·y)/g
где L в м; FQ, G0 в Н.
В формулы координаты х, у подставляют соответствующими знаками.
4.3. Опорные детали.
Подшипники качения рассчитывают по статической грузоподъемности: упорные – по вертикальной нагрузке 2FB; радиальные – по горизонтальной Fг. Подшипники горизонтальных роликов определяют также по статической грузоподъемности при действии наибольшей нагрузки Fмах. Если ролик установлен на двух подшипниках, то на каждый подшипник действует сила Fmax/2. Предварительный диаметр роликов выбирают по условию D≈(Fmax)1/2, где D в мм; Fmax в Н.
Напряжения σн в месте контакта роликов с колонной проверяют по п.3.3.
Опорно-поворотный круг выбирают по каталогу в зависимости от значений вертикальной нагрузка Fв и момента М, которые определены в п.4.2.
4.4. Сопротивление повороту механизмов с приводными колесами.
В курсовых проектах следует учитывать только момент сил трения.
Кран с внешней опорой и переменным вылетом (см. рис.18)
Момент сопротивления повороту относительно оси колонны
Ттр=Fв·f1·d1/2 + F2f2d2,
где d1 – диаметр упорного подшипника; d2 – диаметр ралиального подшипника; f1 и f2 – приведенный коэффициент трения, принимаемый по табл. 16 для упорного и радиального подшипников соответственно.
Кран с неподвижной колонной и постоянным вылетом (см. рис.19)
Момент сопротивления повороту относительно оси колонны
Ттр=FBf1d1/2 + Fгf2d2/2 + (Fг/cosα)·(μ+f3d3/2)(Dкол+D)/D
где d2 – диаметр радиального подшипника в верхней опоре;
d3 – диаметр подшипника в ролике; μ – коэффициент трения качения, принимаемый по табл. 15.
Кран на поворотной платформе (см. рис. 20)
Момент сил трения относительно оси вращения при исследовании шарикового поворотного круга
Tтр = (f/2)·(4,5M + FBDкр + 2,5Fг·Dкрtg α )
где f=0,004 – приведенный коэффициент трения; Dкр – диаметр поворотного круга по центрам шариков; α – угол контакта шариков; если нет данных, можно принимать α=450; М – выворачивающий момент (см. п. 4.2)