

Рама амортизационная ра–6 серия 2
Рама амортизационная РА-6 серия 2 предназначена для установки на нее блока усилителей БУ-12 серия 2 и соединяет через переходные жгуты блок усилителей БУ-12 серия 2 с остальными и блоками системы.Внешний вид амортизационной рамы РА-б серия 2 приведен на рис. 8.
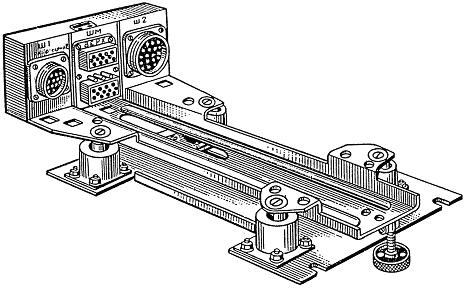
Рис.8 Рама амартизационная РА–6 серия 2
Коррекционный механизм км-2 серия 1 Назначение
Коррекционньый механизм КМ-2 серия 1 (рис.9) предназначен:
– для воспроизведения углового положения условной оси чувствительности индукционного датчика относительно горизонтальний составляющей напряженности магнитного поля Земли;
– для компенсации девиации;
– для компенсации методических и инструментальных погрешностей магнитного корректора;
– для формирования и выдачи магнитного (или истинного) курса в систему;
– для работы в качестве задатчика курса.
Условия эксплуатации
Коррекционный механизм КМ-2 серия 1 может эксплуатироваться в следующих условиях:
– при воздействии вибрации в диапазонах частот и виброускорений
с амплитудой смещения 1,0 мм…………………….………………………...от 5 до 30 Гц
с амплитудой смещения 0,5 мм.........................................................................от 30 до 60 Гц
с перегрузкой от ускорения 5g………………………...……………..………от 60 до 300 Гц
– при воздействии ударного ускорения при частоте ударных импульсов
40–80 ударов в минуту.............................................................................................................до 12 g
Технические данные
Погрешность в
режиме МК………………………......………….…………….не
более
![]() 30'
30'
Скорость отработки первого канала…………………..........................не менне 3,5 градус/с
Рабочая частота канала ИД – КМ..................................................................................4,5 кГц
Нестабильность роботы в диапазоне температур окружающего
воздуха от +60 до -60°С..........................................................................................не более 25'
Компенсация полукруговой девиации по каждому коэффициенту................................ 8°
Компенсация погрешности от ускорения Кориолиса до скорости........................2500 км/ч
Устранение четвертной девиации и инструментальной погрешности (лекальный устройством)............................................................................................................................... 1,5°
Компенсация установочной погрешности в пределах...................................................... 5°
Точность выдачи контрольного угла 315° (схемой контроля)...................................... 10°
Напряжения питания:
– постоянного тока......................................................................................................27 2,7 В
– переменного тока..................................................................................36 -3,6+1,8 400 8Гц
Ввод угла магнитного склонения или угла начальной выставки (ЗК) кремальерой ввода склонения................................................................................................................................... 360°
Масса...................................................................................................................не болееЗ,75кг
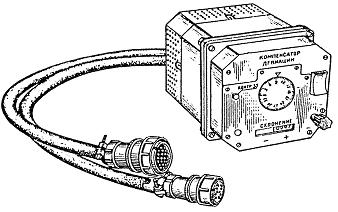
Рис.9 Коррекционный механизм КМ–2 серия 1