

ИСХОДНЫЕ ДАННЫЕ ДЛЯ ПРОЕКТИРОВАНИЯ
 Система
регулирования скорости реверсивного
электропривода ДПТ с широтно-импульсным
преобразователем:
Система
регулирования скорости реверсивного
электропривода ДПТ с широтно-импульсным
преобразователем:
– тип мотор-редуктора IG-42GM, напряжение питания – 24 В;
– управление несимметричное;
– регулирование скорости – дискретное 3 бита (8 скоростей) – 40, 80…320рад/с;
– индикация – текущего задания скорости на семисегментных индикаторах в рад/с;
– входы управления – сигнал разрешения, сигнал направления вращения.
Таблица 1 – Основные характеристики двигателя IG-42GM
UН, В |
MН, г·см |
nН, об/мин |
IН, мА |
n0, об/мин |
I0, мА |
P, Вт |
Imax, А |
Imax имп, А |
24 |
609 |
6013 |
< 2150 |
7000 |
< 500 |
50,8 |
4 |
20 |
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ…………………………………………………………………...…...5
1 РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ………………………...…..6
2 ВЫБОР ТИПА УПРАВЛЯЮЩЕГО УСТРОЙСТВА…………………...........8
3 ВЫБОР ИЛИ РАЗРАБОТКА ТРЕБУЕМЫХ
ИСТОЧНИКОВ ПИТАНИЯ……………………………………………….....…10
4 ВЫБОР СИЛОВЫХ КЛЮЧЕЙ………….……………………..……………..16
 5
ВЫБОР ДРАЙВЕРОВ
ДЛЯ УПРАВЛЕНИЯ
5
ВЫБОР ДРАЙВЕРОВ
ДЛЯ УПРАВЛЕНИЯ
СИЛОВЫМИ КЛЮЧАМИ…………………………………………………...…17
6 ВЫБОР КОММУТАЦИОННОЙ АППАРАТУРЫ И
ЭЛЕМЕНТОВ УПРАВЛЕНИЯ………………………..………………………..18
7 РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ СХЕМЫ
УПРАВЛЕНИЯ И ПЕРЕЧНЯ ЭЛЕМЕНТОВ………………………………….21
8 РАСЧЕТ ВРЕМЕННЫХ ДИАГРАММ………………………………………22
9 РАЗРАБОТКА ПРОГРАММЫ УПРАВЛЯЮЩЕГО
УСТРОЙСТВА…………………………………………………………………...23
ЗАКЛЮЧЕНИЕ…………………………..……………………………...............30
БИБЛИОГРАФИЧЕСКИЙ СПИСОК……………………...………...................31
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ А. СПИСОК ЭЛЕМЕНТОВ...………………………………..32
 ВВЕДЕНИЕ
ВВЕДЕНИЕ
Целью данного курсового проекта является проектирование микропроцессорной системы управления электроприводом
Микропроцессорные системы управления получают все большее распространение в современном электроприводе.
В процессе проектирования выбираются устройства комутации, активный элементы и источники питания.
Спроектированная система управления построена на микропроцессоре фирмы ATMEL ATmega48/V. Язык программирования ASSEMBLER.
Наладка и апробирование производится на лабораторных стендах кафедры ЭПА ЮУрГУ.
Преимуществом проектируемой системы является ее универсальность, поскольку она способна удовлетворить разнообразному сочетанию требований со стороны технологического процесса, а также гибкость ее модернизации, так как изменению подвергается программная часть системы.
1 Разработка функциональной схемы
На функциональной схеме представлены:
DD1 – управляющее устройство (микроконтроллер AVR);
DD2, DD5 – устройства опторазвязки;
DD3, DD4 – микросхемы драйверов;
VT1-VT4 – силовые ключи;
VD1-VD4 – обратные диоды силовых ключей;
HG1-HG4 – семисегментные индикаторы;
QZ1 – кварцевый резонатор;
SA1 – тумблер, включает и отключает сигнал разрешения;
SB1 – тумблер, осуществляет реверс двигателя;
SA2, SA3, SA4 – тумблеры задания скорости;
М – двигатель постоянного тока.
Ниже будет представлена функциональная схема проектируемой системы.
2 Выбор типа управляющего устройства
Для обеспечения функционирования системы управления требуется:
– 21 канал ввода/вывода;
– 1 таймер (один восьмиразрядный таймер для обеспечения двух каналов ШИМ и индикации);
С учетом этих требований выбираем микроконтроллер ATmega48/V (рисунок 2). Характеристики микроконтроллера приведены в таблице 1.
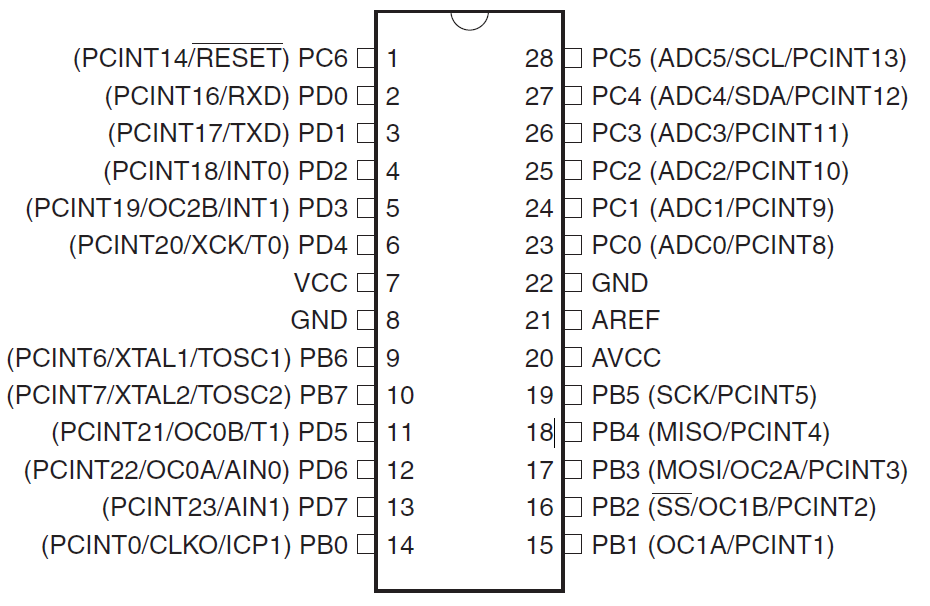
Рисунок 2 – Микроконтроллер ATmega48/V
Назначение выводов:
VCC – напряжение питания
GND – общий провод
AVCC – аналоговое питание для АЦП
AREF – внешний источник опорного напряжения для АЦП
PB0...PB7 – Выводы порта B
PC0...PC6 – Выводы порта C
PD0...PD7 – Выводы порта D
Альтернативные функции выводов:
RESET – сброс микроконтроллера
XСK – внешний тактовый вход интерфейса USART
XTAL1, XTAL2 – подключение кварцевого резонатора
T0, T1 – входы таймеров Т0, Т1
OC0А, OC1A, OC2А, OC0B, , OC1B, OC2B – выходы таймеров
ICP – вход захвата таймера Т1
INT0, INT1, INT2 – входы внешних прерываний
AIN0, AIN1 – входы аналогового компаратора
SS – сетевой режим по интерфейсу SPI
MOSI – выход интерфейса SPI
MISO – вход интерфейса SPI
SCK – тактовый вход интерфейса SPI
RXD, TXD – вход и выход USART
SDA, SDL – линии последовательной передачи данных и тактовых импульсов по шине I2C
TOSC2, TOSC1 – выводы подключение часового резонато
ра 32768 Гц
ADC0...ADC5 – каналы АЦП
Таблица 1 – Характеристики микроконтроллера ATmega48/V
Flash, кбайт |
СППЗУ, байт |
ОЗУ, байт |
I/O |
Fmax, МГц |
Vcc, В |
Таймер 16-бит |
Таймер 8-бит |
ШИМ, каналов |
RTC |
8 |
256 |
512 |
23 |
20 |
1,8-5,5 |
1 |
2 |
6 |
- |
 Продолжение
таблицы 1
Продолжение
таблицы 1
SPI |
USART |
TWI |
ISP |
10-бит АЦП, каналов |
Компа-ратор (ан.) |
Детек-тор Vcc |
WD |
Osc. |
Корпус |
1 |
1 |
+ |
+ |
8 |
+ |
+ |
+ |
+ |
PDIP28 |
В данном курсовом проекте нам потребуется отдельный источник питания для микроконтроллера ATmega48/V с уровнем напряжения в 5 В.
Ниже представлены зависимости потребляемого тока от частоты микроконтроллера (рисунок 6):
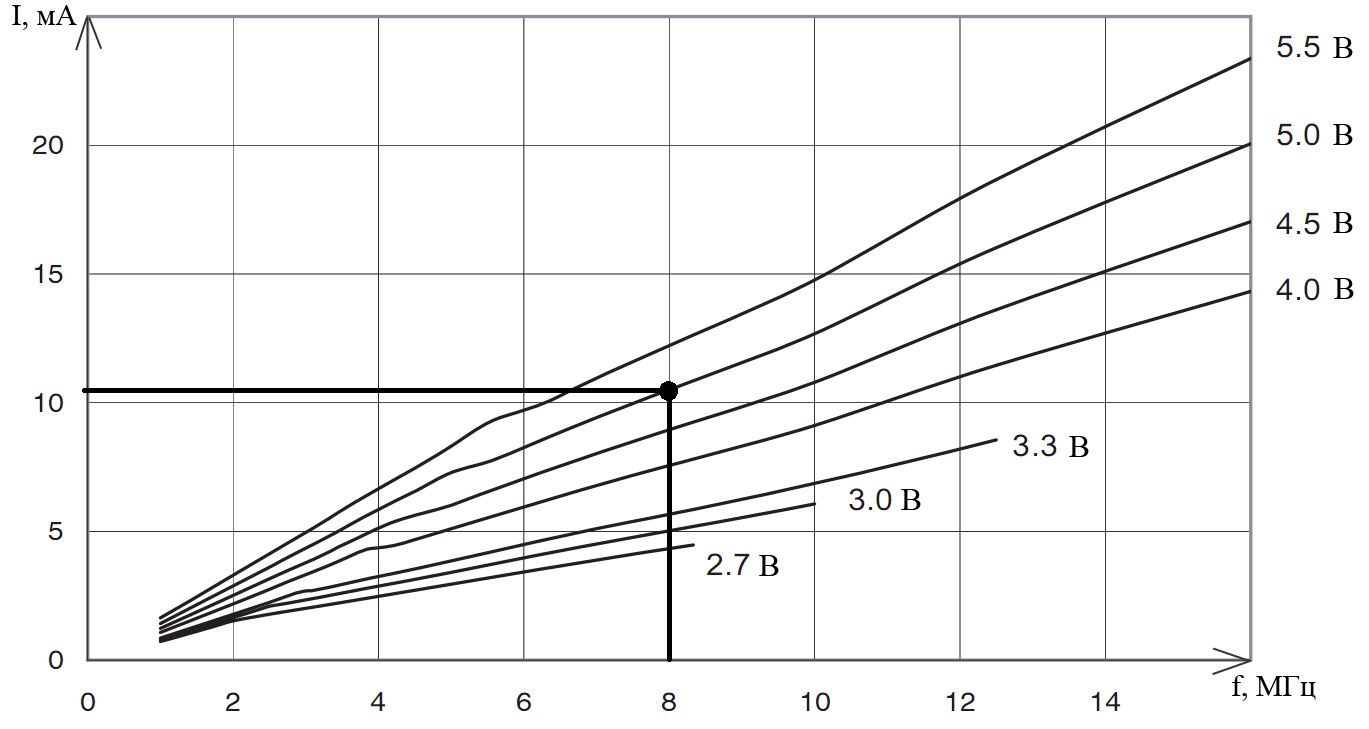
Рисунок 6 – Зависимости потребляемого тока от частоты микроконтроллера
На графике видно, что при напряжении питания 5 В и частоте 8 МГц микроконтроллер потребляет около 11 мА. Отсюда можно рассчитать мощность потребляемую микроконтроллером:
PAVR=IПИТ·UПИТ=0,011·5=0,055 Вт.
Для индикации выходных сигналов выберем семисегментный индикатор CA04-41SRWA (рисунок 7 и таблица 5):


Рисунок 7 – Семисегментный индикатор CA04-41SRWA
 Таблица
5 – Технические параметры семисегментного
индикатора CA04-41SRWA
Таблица
5 – Технические параметры семисегментного
индикатора CA04-41SRWA
-
Наименование
Значение
Материал
GaAlAs
Цвет свечения
красный
Длина волны, нм
640
Минимальная сила света Iv мин., мКд
8
Максимальная сила света Iv макс., мКд
18
При токе Iпр., мА
10
Количество сегментов
7
Количество разрядов
4
Схема включения.
Общий анод
Высота знака, мм
10,16
Максимальное прямое напряжение, В
2,5
Максимальное обратное напряжение, В
5
Максимальный прямой ток, мА
30
Максимальный импульсный прямой ток, мА
155
Рабочая температура, С
-40…85
Отсюда можно рассчитать мощность потребляемую индикатором, возьмем максимальные значения:
PИНД=IПР·UМАКС=0,030·5=0,15 Вт.
Исходя из рассчитанных значений токов и мощностей выбираем источник питания MeanWell LPP-100-5. Источника питания на рисунке 8, параметры сведены в таблицу 6:
Таблица 6 - Источник питания MeanWell LPP-100-5
P, Вт |
UВЫХ, В |
IВЫХ, А |
UВХ(AC), В |
UВХ(DC), В |
fВХ, Гц |
100 |
5 |
0–20 |
85 ~ 264 |
120 ~ 370 |
47–63 |

 Рисунок
8 – Источник питания MeanWell
LPP-100-5
Рисунок
8 – Источник питания MeanWell
LPP-100-5
Для полной развязки управляющих сигналов и силовой части выбираем источник питания для оптотиристорных модулей с выходами на управляющие каналы драйверов(будут выбраны ниже), с уровнем напряжения 12 В.
По заданным параметров находит источник MeanWell LPP-100-12 (рисунок 9, таблица 7)
Таблица 7 - Источник питания MeanWell LPP-100-12
P, Вт |
UВЫХ, В |
IВЫХ, А |
UВХ(AC), В |
UВХ(DC), В |
fВХ, Гц |
100 |
12 |
0–8.5 |
85 ~ 264 |
120 ~ 370 |
47–63 |
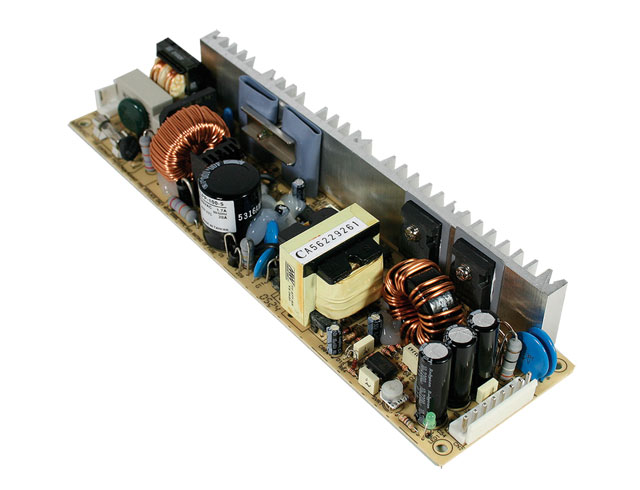
Рисунок 9 – Источник питания MeanWell LPP-100-12
3 ВЫБОР ИЛИ РАЗРАБОТКА ТРЕБУЕМЫХ ИСТОЧНИКОВ ПИТАНИЯ
Характеристики двигателя IG-32PGM представлены в таблице 2.
Таблица 2 – Характеристики двигателя IG-32PGM
UН, В |
MН, г·см |
nН, об/мин |
IН, мА |
n0, об/мин |
I0, мА |
P, Вт |
24 |
609 |
6013 |
< 2150 |
7000 |
< 500 |
50,8 |
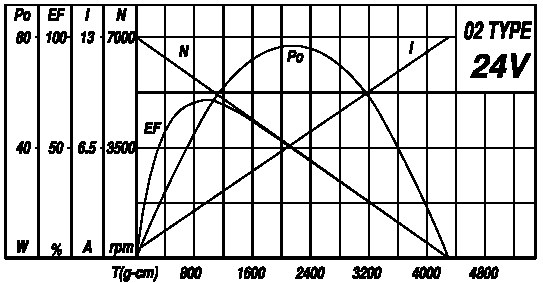

Рисунок 3 – Статические характеристики двигателя IG-42GM
Пусть при пуске двигателя момент нагрузки будет максимальный и равен:
MMAX= 2MН=1200 г·см,
тогда ток максимальный ток будет равен: