

Описание лабораторной установки
На рис. 2.1 представлена упрощенная схема следящей МПСУ.
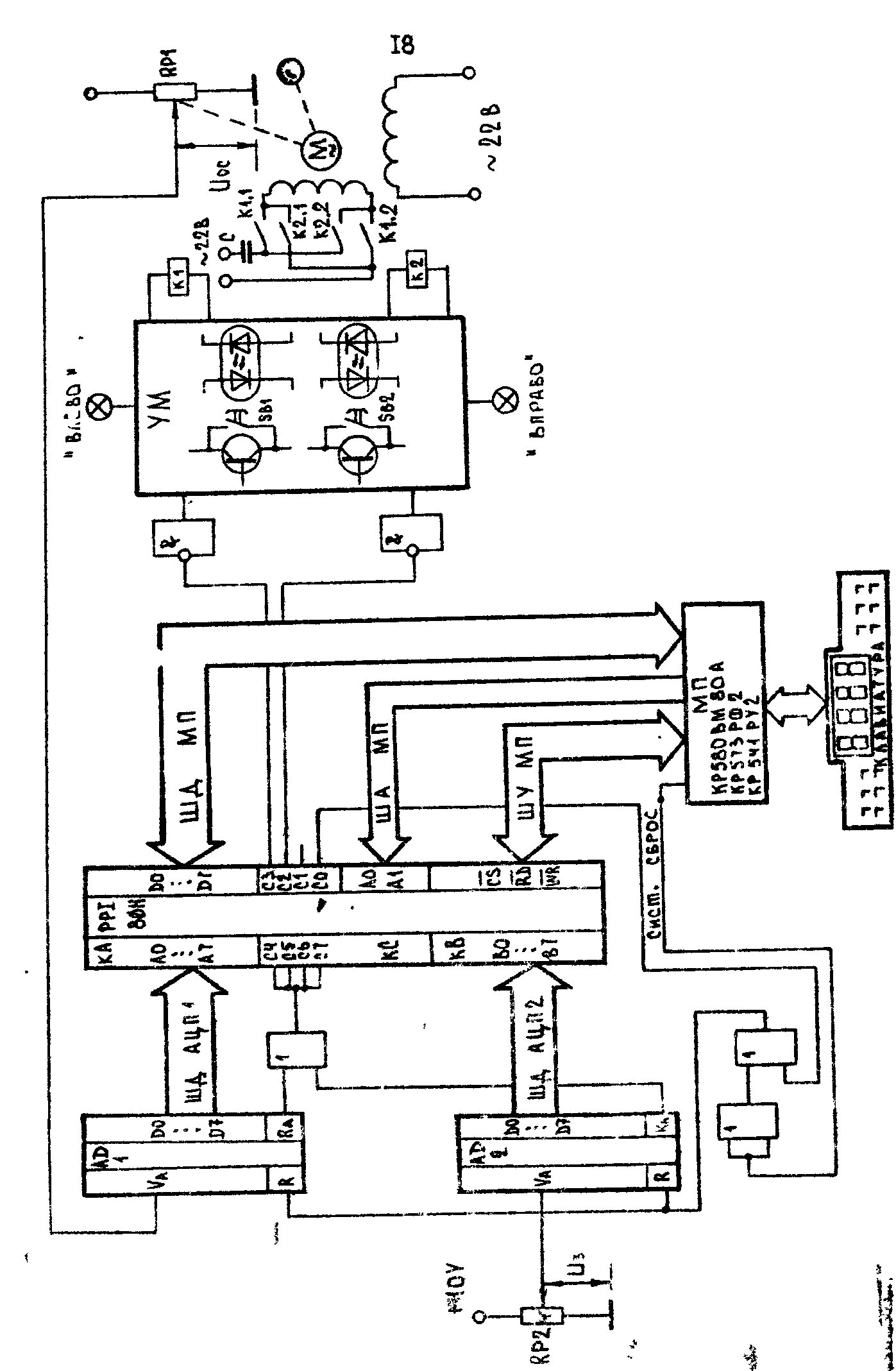
Рис. 2.1. Упрощенная схема следящей МПСУ
В нее входят: учебный микропроцессорный комплект УМК-80, позволяющий вводить программы, производить отладку и запускать их; схема ввода аналоговых и вывода дискретных сигналов; усилитель мощности (УМ) управляющих сигналов; объект управления – сервомотор.
Схема ввода аналоговых сигналов была рассмотрена в предыдущей лабораторной работе и построена аналогично на двух АЦП К1113ПВ55.
Для вывода дискретных сигналов из МПС используются незадействованные выводы полуканала КС1 PPI. Управляющие сигналы с выводов С3 и С2 поступают на УМ и после усиления обеспечивают срабатывание реле К1 или К2. Посредством контактов реле осуществляется пуск двигателя переменного тока либо в одну сторону, либо в другую. Пуск двигателя "Влево" или "Вправо" также можно осуществить вручную с помощью кнопок SB1 и SB2, выведенных на лицевую панель лабораторной установки. Вал двигателя через редуктор (он на схеме не показан) механически связан с указателем угла поворота и движком потенциометра RP1. Напряжение Uос, снимаемое с потенциометра RP1, пропорционально углу поворота указателя и подается на АЦП1 МПС. На указатель угла поворота нанесена шкала – 165… + 1650 с ценой деления 50. Отрицательные значения угла закрашены темным цветом. На АЦП2 подается второй аналоговый сигнал U3 с потенциометра RP2, который является задатчиком.
Алгоритм функционирования МПС реализован в виде программы, хранящейся в постоянном запоминающем устройстве с адреса 8000Н. На рис. 2.2 приведена укрупненная блок-схема алгоритма функционирования МПС.

Рис. 2.2. Блок-схема алгоритма функционирования следящей МПС
Блок 1 осуществляет инициализацию РРI с базовым адресом 80Н. Необходимо каналы КА, КВ «Настроить» на ввод, КС1 – на вывод, КС2 – на ввод. Режим работы РРI – «0».
Блок 2 осуществляет ввод аналоговых сигналов U3 и Uос с соответствующих АЦП через РРI в память МПС.
Блок 3 осуществляет разветвление программы по соотношению введенных в МПС величин Uос и U3. Если Uос U3, то выполняется блок 6, в противном случае – блок 4.
Блок 4 осуществляет разветвление программы по соотношению величин (U3 - Uос) и ∆, где ∆ - константа, хранящаяся в оперативной памяти по адресу 0951Н, определяет зону нечувствительности МПСУ. Код 00Н, записанный в ячейку с адресом 0951Н, определяет ∆ = 0В, код FFH - ∆ = 10В. Если (U3 - Uос ) ∆, то выполняется блок 8, в противном случае – блок 5.
Блок 5 осуществляет включение двигателя «Вправо» путем вывода «1» в разряд С2 РРI.
Блок 6 осуществляет разветвление программы по соотношению величин (U3 - Uос) и ∆. Если (U3 - Uос ) ∆, то выполняется блок 8, в противном случае блок – 7.
Блок 7 осуществляет включение двигателя «Влево» путем вывода «1» в разряд С3 РРI/
Блок 8 осуществляет отключение двигателя путем вывода «0» в разряды С2 и С1 РРI.
Блок 9 осуществляет вывод на дисплей УМК-80 величин U3 и Uос в шестнадцатеричном формате. В два левых разряда дисплея выводится величина U3, в два правых - Uос.