

3.2.2 Числовая информация
В AS системе числовые величины и выражения могут быть использованы как числовая информация. Числовое выражение есть величина, выраженная числами или переменными в комбинации с операторами и функциями. Числовые выражения могут использоваться не только как математические вычисления, но и как параметры в командах, инструкциях, функциях.
Для примера, в DRIVE команде, три параметра: номер сустава, градус, и скорость задаются. Параметры могут быть выражены либо в числовых значениях, либо в выражениях, как показано в примере:
Пример
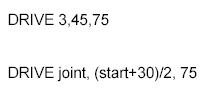
Первая инструкция задает движение третьего сустава на 45 градусов со скоростью 75%.
Вторая инструкция задает движение второго сустава на +30 градусов со скоростью 75%,
если joint=2, start=30
Числовые величины в AS системе подразделяются на три типа:
1. Действительные числа
Действительные числа могут быть целыми и дробными, положительными и отрицательными или нулем в пределах от –3.4Е+38 до 3.4Е+38. Действительные числа могут быть выражены в экспоненциальном представлении. Символ Е разделяет мантиссу и экспоненту.
Пример

Обратите внимание, что первые семь цифр допустимы, но количество допустимых цифр может быть уменьшено через процедуры вычисления.
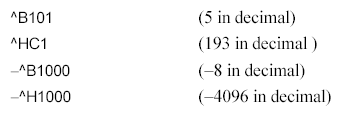
Реальные значения без дробных частей (целые числа) называют целыми числами. Диапазон от −16,777,216 до +16 777 215 и для тех, чьи значения превышают этот предел, первые семь цифр допустимы. Целочисленные значения обычно вводятся в десятичные числа, хотя временами является удобным выражение в двоичном или шестнадцатеричном виде. ^B впереди числа означает число в двоичном виде, ^H впереди числа означает число в 16-ом виде.
Пример
2. Логические величины
Логические величины имеют только два состояния ON/OFF или TRUE/FALSE (ВЕРНО/ЛОЖНО). Величина –1.0 присваивается для состояния TRUE или ON, величина 0.0 присваивается для состояния FALSE или OFF. ON, OFF, TRUE, FALSE используются, как ключевые слова в AS программировании.
3. ASCII величины
Показывают числовые значения каждого символа ASCII кода. Символ, имеет впереди апостроф (‘) чем отличается от других величин
Пример
![]()
3.2.3 Символьная информация
Символьная информация передается в AS систему, как строка ASCII символов, заключенных двойные кавычки (“ ”). Т.к. двойные кавычки означают начало и конец символьной цепочки, они не могут быть использованы как составная часть в строке символов. Также управляющие символы ASCII (CTRL, CR, LF и т.д.) не могут быть включены в символьную цепочку.
Пример

3.3 Переменные
В AS системе, названия могут быть присвоены информации о позиции, числовой информации, и символьной информации. Эти названия называются переменными, и переменные могут быть разделены на два типа:
глобальные переменные и локальные переменные. Если иначе не отмечено, глобальные переменные упоминаются как переменные.