

3.2. Информация о позиции, числовая информация, символьная информация
Есть три типа информации в AS системе: позиционная* информация, числовая информация, и символьная информация.
ПРИМЕЧАНИЕ* "Позиция" прежде назывался "местоположением", но в соответствии с международным стандартом (Международная организация по стандартизации), в этом руководстве, упоминается как позиция, чтобы выразить и координату позиции и ориентацию робота одним словом.
3.2.1 Позиционная информация
Позиционная информация используется для точного определения положения и ориентации робота в заданной рабочей области, т.е. эту информацию можно понимать как координатную информацию. Координата точки, определяющей положение и ориентацию робота в пространстве, находится в центре фланца робота (TCP – tool center point). В AS системе каждой запоминаемой координате присваивается имя. Имя начинается обязательно с буквы или знака #. Именам нельзя присваивать наименования команд, инструкций, функций.
Позиция определяется тем, где робот находится и каким образом он поворачивается, поэтому, когда робот проинструктирован, чтобы двигаться, две вещи делаются в одно и то же время:
1. TCP робота перемещается в указанную позицию.
2. Инструментальная система координат робота вращается к указанному положению.
В AS системе возможны два типа задания координатной точки в трехмерном пространстве: последовательностью угловых смещений каждой из осей суставов, относительно какого-то начального положения (в дальнейшем будем называть угловая координата), последовательностью линейных и угловых смещений начала базовой системы координат (в дальнейшем будем называть декартовая координата)
1. Угловая координата
Используя значения кодера (кодирующего устройства), по количеству вращений вала каждого из суставов рассчитываются угловые смещения каждой из осей суставов относительно какого-то начального положения. Последовательность величин смещений каждой оси задается в градусах. Данная последовательность при запоминании задаст положение и ориентацию центра фланца робота в пространстве. При запоминании точки в угловых координатах необходимо перед буквой поставить знак #.
Пример

2. Декартовая координата
Описывает положение координат по отношению с рекомендуемыми координатами. Если не определено иначе, это относится к значениям преобразования координат инструмента относительно основных координат робота. Позиция дается значениями XYZ для основных координат, и положением О, А, Т углов Эйлера*.
Некоторые из обычно используемых значений преобразования:
значение преобразования инструмента, описывает положение инструментальной системы координат относительно нулевой инструментальной системы координат, и значения преобразования системы координат детали, описывающие положение инструментальной системы координат относительно координат детали.
Положение и ориентация центра фланца в пространстве задается последовательностью смещений начала инструментальной системы координат относительно начала базовой системы координат координатами X, Y, Z и углами Эйлера O, A, T .

Углы Эйлера
O – угол между плоскостью Zz и плоскостью XZ
A – угол между осью z и осью Z
T – угол между осью x и осью X”
Ось X” лежит в плоскости Zz и образует с осью z угол 90 градусов.
Имя декартовой координаты начинается с буквы.
Пример

Если робот имеет больше чем шесть осей, значение дополнительной оси показывают с декартовым значением
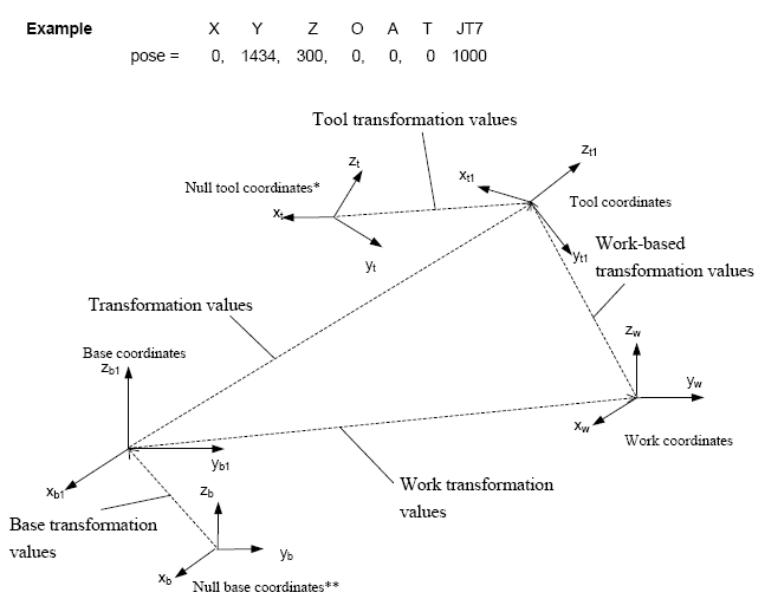
ОБРАТИТЕ ВНИМАНИЕ *, нулевые координаты инструмента имеют свое начало координат в центре монтажной поверхности фланца, и они описаны значениями преобразования инструмента (0,0,0,0,0,0).
ОБРАТИТЕ ВНИМАНИЕ, ** Нулевые основные координаты установлены как значение по умолчанию для робота, и описаны основными значениями преобразования (0,0,0,0,0,0).
Угловые координаты и декартовые координаты имеют преимущества и
недостатки. Используйте их так, чтобы удовлетворить вашу потребность.
|
Значение угловых координат |
Значение декартовых координат |
Преимущества |
Достигается точность воспроизведения и нет никакой двусмысленности о конфигурации робота в позиции
|
· начало инструментальной системы координат, используемое в автоматическом режиме не изменяется даже если инструмент заменен. (Нулевой сдвиг координат инструмента) · Может использовать относительные координаты (например, координаты детали) · Удобны для того, чтобы обрабатывать как данные, показанные в значениях XYZOAT
|
Недостатки |
TCP изменяется, когда меняется инструмент (нулевые координаты инструмента остаются теми же самыми) · Не может использовать относительные координаты (например, координаты детали, и т.д.)
|
· Координаты изменятся согласно базовым или инструментальным значениям преобразования, поэтому необходимо полное понимание эффекта любого изменения для безопасного использования · конфигурация Робота может измениться, если она не установлена перед повторяющимися движениями
|
Советы по использованию |
Установка стартовой позиции в программе · Установка конфигурации робота в или как раз перед позицией, заданной в декартовых координатах · Использование для других общих положений
|
· Описание относительных координат типа координат детали · Описание позиции, которая должна быть изменена, используя числовые значения с функциями типа SHIFT · Описание позиции, которая должна быть изменена по информации датчика
|
(ПРИМЕЧАНИЕ)
1. В отличие от позиции, определенной угловыми координатами, где конфигурация робота устанавливается однозначно, когда позиция задана декартовыми координатами, робот может принять различную конфигурацию относительно этой позиции. Это происходит, потому что значения декартовых координат только устанавливают
XYZOAT значения координат инструмента робота и не определяют значение оси
каждого сустава. Поэтому, перед стартом робота в повторном режиме, убедитесь, что установили конфигурацию робота, используя команды конфигурации (LEFTY) или делая запись значений угловых координат.
2. Так как декартовые значения описаны основными координатами, если центр координат
сдвинут, используя команду/инструкцию BASE, TCP робота будет также сдвинута на
ту же самую величину. Это - одно из преимуществ использования декартовых значений, но обратите внимание, что изменение основных координат будет влиять на все декартовые точки.
Неудачное применение может вызвать несчастные случаи типа столкновения с периферийными устройствами.
Учитывайте то же самое предостережение при использовании команды/инструкции TOOL.