

11.3 Внешнее взаимодействие
Этот пример демонстрирует работу, выполняемую синхронно с внешними устройствами.
Эта программа использует команды: SIGNAL, IF, SWAIT, ONI, IGNORE.
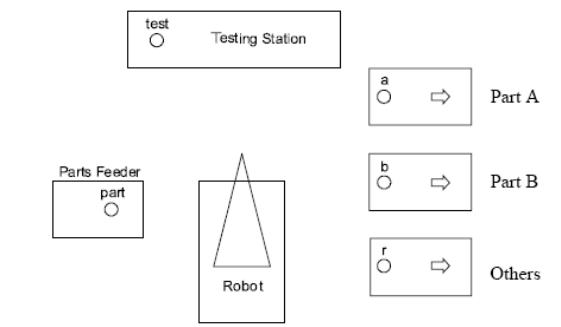
1. Два типа деталей, А и B, установлены на подающем лотке в случайном порядке. (Входной сигнал для завершения установки детали на подающем лотке: IN1)
2. Робот поднимает деталь с подающего лотка и устанавливает ее в станцию тестирования
(Выходной сигнал для начала тестирования:OUT1)
3. На станции тестирования, детали классифицируются в деталь A, деталь B или в другую, отличную от А и В.
Входной сигнал для завершения тестирования: IN2
Входной сигнал для классификации деталей: IN3, IN4
(IN3, IN4) = (1, 0): деталь A
(IN3, IN4) = (0, 1): деталь В
(IN3, IN4) = (0, 0) или (1, 1): Другие
4. Робот размещает детали согласно классификации каждой детали.
Если любая неисправность возникает со станцией тестирования, в то время как робот поднимает деталь с подающего лотка и переносит ее к станции, программа немедленно останавливается и выполняет переход к подпрограмме обработки неисправности. Внешний входной сигнал при возникновения неисправности - IN7. Входной сигнал
IN6 поступает, когда неисправность устранена, и робот, как только получает этот сигнал, продолжает выполнение программы.
Главная программа для выполнения вышеупомянутой задачи называется MAIN, подпрограмма обработки неисправностей называется EMERGENCY
Пример программы
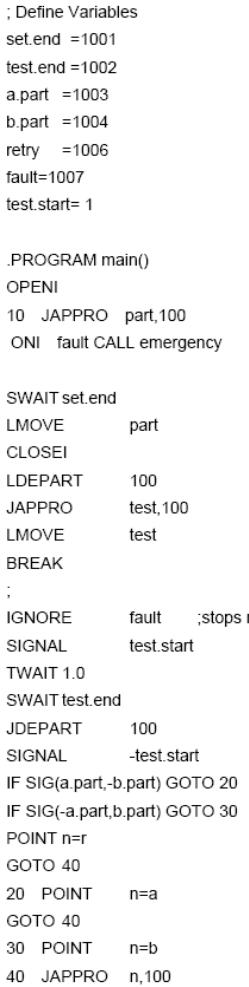
; деталь на месте взятия на подающем лотке
:тестирование детали завершено
: деталь а
;деталь в
; неисправность устранена
;возникновение неисправности
;сигнал начала тестирования
;контроль сигнала неисправности и переход к подпрограмме обработки неисправности
;деталь на месте взятия на подающем лотке
;Движение к детали (на лотке)
;перенос детали к станции тестирования
:останавливает контроль сигнала неисправности
;включает сигнал тестирования детали
;ожидает завершения тестирования
;выключает сигнал тестирования
; классифицирует детали и переходит к определенной метке, если деталь А – к метке 20, если деталь В - к метке 30
;если деталь ни А, ни В переход к метке 40
;задание точки, для того чтобы положить деталь А
; задание точки, для того чтобы положить деталь В
;переход к позиции над местом расположения детали

;выводит сообщение об ошибке на экран
;ожидает сигнал о сбросе неисправности
; устанавливает контроль наличия неисправности
;возврат в головную программу
11.4 Преобразование инструментальной системы координат
Эта глава описывает, как получить значения для преобразования инструментальной системы координат и как создавать программы, которые их используют.