Pcscan time
Опция
Назначение
Устанавливает время цикла для выполнения PC программы (программная инструкция).
Параметр
Время
Устанавливает, как долго повторяются программные циклы. Время задается в секундах от 0 и более.
Пояснение
Эта команда используется для выполнения PC программы в определенном временном цикле. Если время выполнения больше заданного времени, время, заданное здесь игнорируется.
Пример

Если программа выполняется непрерывно, используя команду PCEXECUTE (выполняемый цикл –1), выходной сигнал 1 включается, выключается каждую секунду.
11. Примеры программ
Эта глава показывает примеры некоторых программ, используемых в системе AS языка.
11.1 Первоначальные установки для программ
11.2 Паллетирование
11.3 Внешнее взаимодействие
11.4 Преобразование инструментальной системы координат
11.5 Относительные позиции
11.6 Использование относительных позиций с функцией FRAME
11.7 Установка конфигураций робота
11.1 Первоначальные установки для программ
Для более простого программирования, параметры настройки, показанные ниже, делаются до выполнения любой функции на роботе.
· Перемещают робот в домашнюю позу (позиция и конфигурация).
· Определяют необходимые переменные для каждой задачи (например для паллетирования, устанавливают количество деталей на поддоне)
· Инициализируют счетчик, флажок, и т.д.
· Устанавливают инструментальную систему координат, чтобы использоваться в этой задаче.
· Устанавливают базовую систему координат, чтобы использоваться в этой задаче.
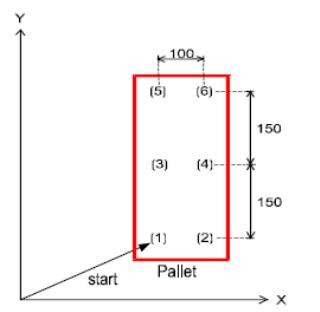
В примере, показанном выше, детали укладываются на поддон в порядке от (1) до (6). В этом случае программа, подобная показанной ниже будет использоваться для первоначальных установок. В этом примере, поддон параллелен базовым координатам робота.
1 BASE NULL ;задает нулевую базовую систему координат робота (NULL)
2 TOOL tool1 ;задает инструментальную систему координат (tool1)*
3 row.max=3 ;3 ряда
4 col.max=2 ;2 столбца
5 xs=100 ;устанавливает известное расстояние по координатной оси X (ΔX=100mm)
6 ys=150 ;устанавливает известное расстояние по координатной оси Y (ΔY=150mm)
7 POINT put=start ;присваивает значение позиции (1) в переменную put.
8 OPENI ;открывает схват инструмента
9 HOME ;перемещается в позицию home**
ПРИМЕЧАНИЕ* Значение координатыe (tool 1 ) должны быть задано
ПРИМЕЧАНИЕ** Положение НОМЕ должно быть предварительно задано
11.2 Паллетирование
В примере, показанном здесь, детали берутся с подающего лотка и помещаются в поддон в три ряда (на расстоянии 110 мм) и четыре столбца (на расстоянии 90 мм). Для того чтобы упростить объяснение, и поддон и детали, помещаемые в поддон, установлены параллельно базовой системе координат робота.
Также, процедуры синхронизации подающего лотка и робота, при использовании
внешних сигналов ввода - вывода (команда SWAIT, команда SIGNAL, и т.д.) опущены.
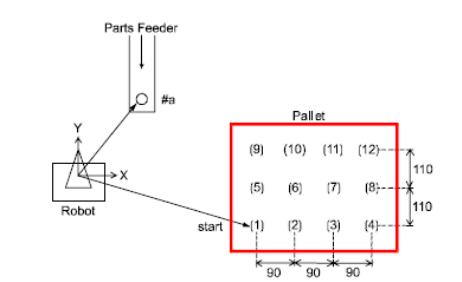
· Паллета установлена параллельно XY плоскости базовой системы координат.
· Позиция #a (Деталь на подающем лотке) и позиция “start” (где кладется первая деталь) обучаются заранее до выполнения программы.
Пример программы

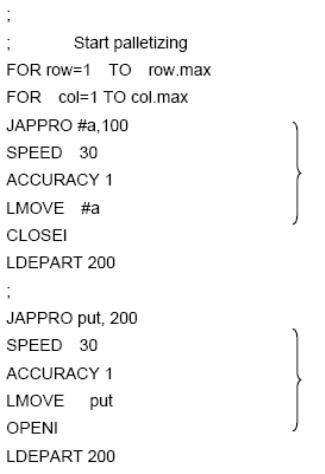
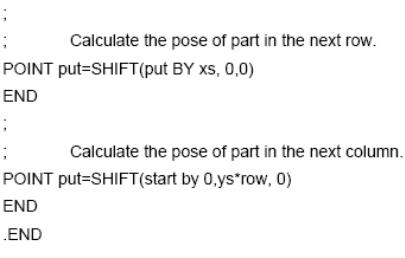
Берет деталь с подающего лотка
Кладет деталь на паллету