

2.6.3 Завершение работы системы
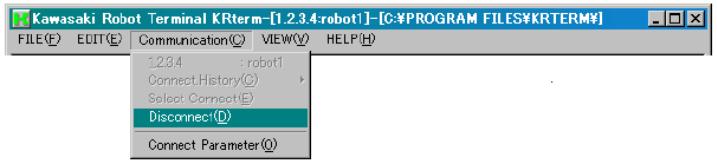
1. Когда робот подключен, выберите из строки меню [Communication(C)] →
[Disconnect(D)], чтобы отключить робот.
2. Выключите контроллер робота.
(1) Поверните переключатель HOLD/RUN в состояние HOLD
(2) Выключите силовое питание привода, нажимая кнопку EMERGENCY STOP.
(3) Выключите силовое питание.
3. Закройте KRterm.
(1) Выберите из строки меню [FILE(F)] → [END(X)].
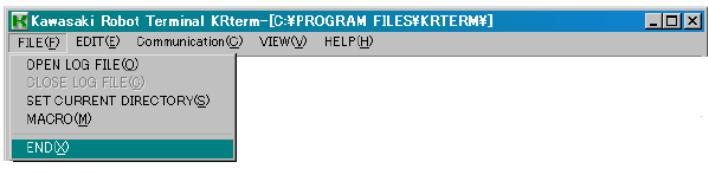
(2) нажмите <Yes>
4. Выключите компьютер.
5. Если нет никакой необходимости сохранять подключение компьютера с контроллером, отсоедините кабель.
Удостоверьтесь, что контроллер и компьютер выключены перед разъединением.
2.6.4 Полезные функции krterm
2.6.4.1 Создание журнала регистрации
Содержание, отображенное на KRterm экране, может быть сохранено как журнал. Это полезно для создания распечатки рабочих процедур робота.
1. Начало регистрации.
(1) Выберите из строки меню [FILE(F)] → [OPEN LOG FILE(O)].
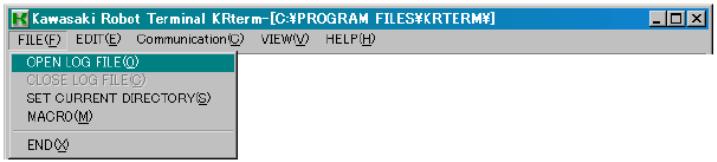
(2) Выберите папку, чтобы сохранить журнал, и назовите файл.
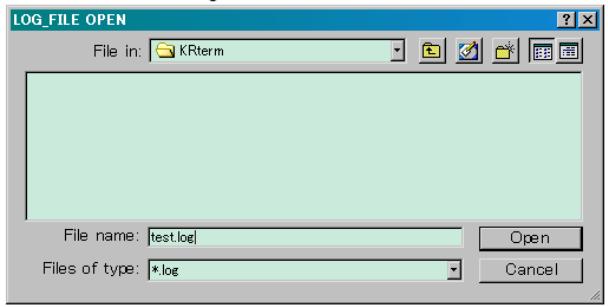
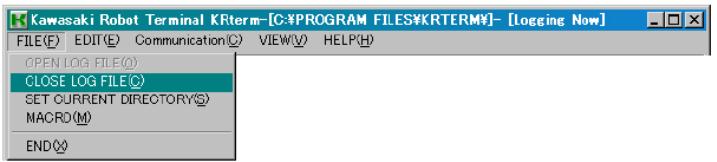
(3) Сообщение [Logging Now] появится в области заголовка. Содержание дисплея
регистрируется, пока журнал не закрыт.

Содержание дисплея регистрируется, пока есть это сообщение.
2. Завершение регистрации
Т.к. регистрация начатав, все содержание дисплея KRterm будет зарегистрировано, пока журнал не закрыт.
Чтобы закрыть журнал и завершить регистрацию, выберите из строки меню [FILE(F)] → [CLOSE LOG FILE(C)].
.
2.6.4.2 Макро функции
Макро функции обеспечены для KRterm и KCwin32 системы. Если задача должна быть
выполняема неоднократно, запись серии команд/инструкций для той задачи в макрокомандах может быть очень полезна и увеличит эффективность.
Чтобы сделать запись макрокоманды, выберите из строки меню [FILE (F)] → [MACRO (M)], и введите имя файла, чтобы сохранить эту макрокоманду. Чтобы выполнить макрокоманду, используйте команду SEND на KRterm экране.
См. Справку в KRterm или KCwin32 для большего количества подробностей.
Информационные выражения в as языке
Эта глава описывает виды информации и переменных, используемых в AS языке программирования
3.0 Информационные выражения в AS языке
3.1 Система обозначений и соглашений
3.2 Информация о позиции, числовая информация, символьная информация
3.3 Переменные
3.4 Имена переменных
3.5 Задание переменных позиции
3.6 Задание реальных переменных
3.7 Задание строковых переменных
3.8 Числовые выражения
3.9 Строковые выражения
3.1 Система обозначений и соглашений
1.Заглавные и строчные буквы.
Для дальнейшего понимания применяются следующие правила использования заглавных и строчных букв в данном руководстве. Все ключевые слова (команды, инструкции и т.д.) показаны заглавными буквами. Переменные, которые могут быть заданы, строчными буквами. Ввод с клавиатуры может быть осуществлен в обоих вариантах.
2. Кнопки и переключатели.
Кнопки на пульте ручного управления и переключатели на операционной панели контроллера, упоминаемые в данном руководстве, заключены в прямоугольный контур
Например: RUN/HOLD
3. Сокращения.
Некоторые ключевые слова могут быть сокращены.
4. Пробел.
Пробел необходимо вводить между командным словом и параметром для их разделения. Пробел необходимо вводить, если параметры не разделены запятыми. Лишние пробелы или табуляции игнорируются системой.
ПРИМЕЧАНИЕ* параметр - необходимые данные, чтобы завершить команды или другие функции. Для примера, в команде SPEED, данные параметра необходимы для того, чтобы определить скорость робота. Когда команда или функция используют несколько параметров, запятая или пробел отделяет каждый параметр.
Пример SPEED 50
5. Кнопка ENTER
Мониторные команды и программные инструкции вводятся нажатием клавиши Enter.
В данном руководстве
ENTER
кнопка может быть в виде
![]()
6. Пропускаемые параметры
Многие мониторные команды и программные инструкции имеют параметры, которые можно пропустить. Но пропущенный параметр должен отделяться запятой, если дальше следуют еще параметры.
7. Числовые значения.
Значения выражаются в десятичном исчислении, если не задано иначе. Математические выражения могут использовать указанные величины как аргументы. Однако, обратите внимание, что приемлемые значения ограничены. Следующие правила показывают, как значения интерпретируются в различных случаях.
(1) расстояние
Используется, чтобы определить длину перемещения робота между двумя точками. Единица измерения для расстояния миллиметр (мм); единица измерения опускается при вводе. Входные значения могут быть любыми отрицательными и положительными
(2) углы
Определяет и изменяет положение робота в указанной позиции, и описывает
количество вращений сустава робота. Значения могут быть отрицательными и положительными, с максимальными углами, ограниченными 180 градусами или 360 градусами, в зависимости от используемых команд.
(3) скалярные переменные
Если не отмечено иначе, эти переменные определяют реальные значения. Значения для переменных могут быть в диапазоне от −3.4E+38 до 3.4E+38 (−3.4×1038 ~ 3.4+1038). Когда значение превышает ±999999, оно выражается как xE+y (x мантисса, y - экспонента).
(4) номер сустава
Выражает сустав робота в целом числе от 1 до номера доступного сустава (стандартный
тип имеет 6 суставов). Суставы пронумерованы, начиная с основного сустава. (Обычно
выражаются JT1, JT2 ....).
(5) номер сигнала
Идентифицирует бинарные сигналы (ON/OFF). Значения даются как целые числа и находятся в следующих диапазонах.

Внешний выходной сигнал
Внешний входной сигнал
Внутренний сигнал
Отрицательные числа указывают состояние OFF
8. Ключевые слова.
В общем, имена переменных могут свободно присваиваться внутри AS системы. Однако, ключевые слова, определяющие команды, инструкции и т.д. не могут присваиваться именам позиций, переменным и т.д.