

9.2 Функции позиционных значений
DEST Выдает позицию назначения как декартовую координату.
#DEST Выдает позицию назначения как угловую координату.
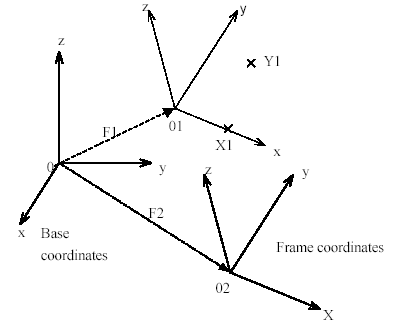
FRAME Выдает значения декартовых координат для координат плоскости рамки.
NULL Выдает ноль значений декартовых координат.
HERE Выдает значение декартовых координат текущей позиции.
#HERE Выдает значение угловых координат текущей позиции.
TRANS Выдает значение декартовых координат. составленных из данных компонентов.
RX, RY, RZ Выдает значение преобразования, выраженное вращением вокруг осей.
#PPOINT Выдает значение угловых координат. составленных из данных компонентов.
.
SHIFT Выдает значение декартовых координат, преобразованных при помощи сдвига начальной позиции
AVE_TRANS Выдает значение декартовой координаты средней позиции между двух позиций.
BASE Выдает значение декартовой координаты для смещения базовой системы координат.
TOOL Выдает значение декартовой координаты для смещения инструментальной системы координат.
TRADD Выдает значение X компоненты при добавлении значения компоненты перемещающейся оси. (опция)
TRSUB Выдает значение X компоненты при отнимании значения компоненты перемещающейся оси. (опция)
#HOME Выдает значение домашней позиции в угловых координатах (опция)
CCENTER Выдает значение декартовой координаты для центра окружности , описанной заданными позициями (опция)
CSHIFT Выдает значение декартовой координаты положения, сдвинутого по направлению к центру окружности , описанной заданными позициями (опция)
DEST
#DEST
Назначение
DEST: Выдает декартовые координатные значения точки назначения текущего движения робота.
#DEST: Выдает угловые координатные значения точки назначения текущего движения робота.
Пояснение
При использовании этих функций, точка назначения может быть распознана после того, как движение робота прервалось по некоторым причинам. Эти функции могут использоваться со всеми движениями робота.
(Примечание)
Позиция, где робот останавливается и позиция, заданная при помощи DEST/#DEST не всегда тоже самое. Для примера, если переключатель RUN/HOLD на операционной панели поворачивается в положение HOLD, робот останавливается мгновенно, но позиция, заданная при помощи DEST/#DEST, описывает позицию, которую робот достигал в тот момент.
Пример
DEST/#DEST функции удобны, когда необходимо возобновить движение, прерванное при помощи инструкции ONI…CALL. Включите следующие инструкции в подпрограмму, как показано ниже, для того чтобы робот мог завершить незаконченное движение.
Записывает
текущую позицию как “save”

Записывает позицию назначения как “old”
Отходит назад на 50 мм по оси Z инструмента
Приближается к позиции “save”, не доходя до нее 50 мм
Движется в точку “save”
Движется в точку “old”
FRAME (transformation values1, transformation values2, transformation values3, transformation values4)
Задает относительную координатную плоскость в базовой системе координат. Заметьте, что только поступательные компоненты используются, как позиционная информация, для определения координатной плоскости.
Параметры
Точка 1, точка 2 (в декартовых координатах)
Задают направление оси X. Ось X, задаваемой координатной плоскости, устанавливается так, что она проходит через эти две точки.
Точка 3 (в декартовых координатах)
Задает направление оси Y. Ось Y координатной плоскости устанавливается так, что три точки: точка 1, точка 2, точка 3 образуют XY плоскость, точка 3 задает положительное направление оси Y.
Точка 4
Задает начало координатной плоскости, которое равно значению, установленному данной функцией.
Пояснение
![]()
Устанавливает координатную плоскость, как показано на рисунке ниже.

Если позиция в координатной плоскости обучена как F1+A, затем только F1 нуждается в переобучении, если координаты обученной траектории меняют свое положение в пространстве.
![]()
Устанавливает координатную плоскость, как показано ниже
(ПРИМЕЧАНИЕ)
Обратите внимание на следующие точки, когда определяется координатная плоскость.

Обратите внимание, что оси Y, Z обеих координатных систем повернуты в противоположные стороны в зависимости от того, как обучена точка а3. Поэтому, когда а3 обучена близко к оси X, направление оси Z может не иметь желательное направление, так что проверяйте координатную плоскость перед использованием координат в любых программах.
Три точки а1, а2, а3 определяются положением начала инструментальной системы координат. Когда переопределяется координатная плоскость, преобразования инструмента должны быть такими же, как при первоначальном обучении а1, а2, а3.
Для более лучшей точности, обучайте три точки а1, а2, а3 настолько далеко друг от друга, как только возможно. Особенно а3, а3 может быть точкой вблизи оси Y, но как можно дальше от оси X.
При обучении а1, а2, а3 начало инструментальной системы координат должно быть определено в точке, которую легко увидеть, например в наконечнике инструмента.
С некоторыми инструментами очень трудно определить начало инструментальной системы координат, когда оно перемещено заданным преобразованием инструмента. В этом случае, а1, а2, а3 обучается без инструмента, но обратите внимание, что в этом случае начало инструментальной системы координат находится в центре фланца робота.
NULL
Назначение
Возвращает нулевое значение преобразований
Пояснение
Возвращает значениям преобразования (декартовым координатам), в которых все поступательные и вращательные элементы устанавливаются в 0.
X=Y=Z=0, O=A=T=0. Эта функция удобна, когда используется с SHIFT функцией, допускающей легко переопределить координату точки. Могут быть сдвинуты только координаты поступательного движения без любых изменений компонентов вращения (OAT).
Пример
![]()
Определяет переменную “new” при помощи сдвига координат точки, обученной как “old” на определенные расстояния вдоль базовых координат.
![]()
Вычисляет расстояние между точкой “test.pos” и началом базовой системы координат, присваивает эту величину переменной dist.
HERE
#HERE
Назначение
HERE: Выдает декартовые координатные значения, которые описывают текущее положение инструментальной системы координат.
#HERE: Выдает угловые координатные значения, которые описывают текущее положение инструментальной системы координат.
Пояснение
В момент выполнения этой функции считываются значения энкодера, поэтому, заметьте, что значения, полученные при помощи этой функции, представляют положение робота, когда эта функция была выполнена.
Имя “here” не может быть использовано как программное имя или имя переменной.
Пример
![]()
Вычисляет расстояние между точкой “pos1” и текущей позицией и присваивает это значение “dist”.
TRANS (X component, Y component, Z component, O component, A component, T component)