

8.4 Бинарные операторы
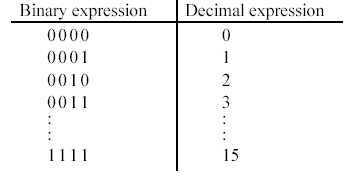
Бинарные логические операции выполняются для каждого соответствующего бита двоичного числового значения. Например, если число состоит из четырех битов, значения, которые должны вычисляться, могут быть следующими 0000,
0001, 0010, 0011, ……, 1111 (В AS, числовые значения составляют 32 бита).
:
В AS числовое значение составляется из 32 битов.

Например
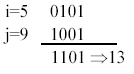
i BOR j

8.5 Операторы векторной алгебры
В AS системе операторы векторной алгебры используются при вычислениях и создании сложных точек. В AS системе операторы + и − используются, для того чтобы определитьare значение сложной координаты (XYZOAT значения). Однако, обратите внимание, что в отличие от обычных сложения и вычитания, переместительный закон не верен для операций векторной алгебры. Арифметическое выражение “ a + b” и “b + a” имеют одинаковый результат, но “pose a + pose b” не обязательно будет равен “pose b
+ pose a”. Это происходит потому что в операциях преобразований, положение осей принимается во внимание. Как пример этого, показано ниже:


Например

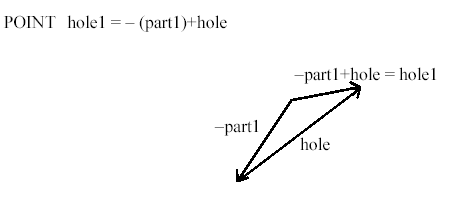
Векторный оператор “-“ используется для однозначного задания обратного значения вектора pos.b. Например, когда вектор pos.b определяет положение объекта В относительно объекта А, вектор –pos.b определяет положение объекта А относительно объекта В.

В примере, показанном ниже, “hole1” должно быть определено относительно “part1”, обученной ранее. Это может быть сделано при помощи задания сложной точки par1+hole.
Переместить робот в позицию, которая будет определять “hole1” и обучить эту точку как “hole”, используя команду HERE. “hole1” может быть задана следующим образом:
Или

Строковые операторы

Например
![]()
Объединяет $b+$c и присваивает это значение $a. Если $b=abc, $c=123, то $a будет “abc123”.
9.0 Функции
Эта глава описывает функции, используемые в AS системе. Функции в основном используются в комбинации с мониторными командами и программными инструкциями. Формат функции следующий: это ключевое слово и параметры, заключенные в круглые скобки. Ключевое слово задает функцию, параметр определяет значение
9.1 Функции реальных значений
9.2 Функции значений позиции
9.3 Математические функции
9.4 Строковые функции

9.1 Функции реальных значений
SIG Выдает логическое AND определенного сигнала.
BITS Выдает значение, соответствующее битовому образцу сигнала.
TIMER Выдает текущее значение таймера.
DISTANCE Выдает расстояние между двумя точками
DX, DY, DZ Выдает значение декартовых координат (X, Y, Z)
DEXT Выдает заданный компонент позиции (опция)
ASC Выдает значение символов ASCII.
LEN Выдает длину строки.
TRUE, ON Выдает значение –1.0, которое представляет TRUE.
FALSE, OFF Выдает значение 0.0, которое представляет FALSE.
VAL Выдает реальное значение в данной строке.
INSTR Выдает значение для начальной точки определенной строки.
MAXVAL Сравнивает данные значения.
MINVAL Сравнивает данные значения .
INT Выдает значение в целом числе.
SWITCH Выдает состояние системного переключателя.
TASK Выдает состояние выполнения программы.
ERROR Выдает номер ошибки.
PLCAIN Выдает количество данных (опция)
PRIORITY Выдает приоритет программ робота (опция)
UTIMER Выдает текущее значение таймера.
MSPEED Выдает мониторную скорость робота 1. (опция)
MSPEED2 Выдает мониторную скорость робота 2. (опция)
INRANGE Проверяет находится ли позиция в диапазоне движения (опция)
SYSDATA Выдает параметры AS (опция)
SIG(signal number)
Назначение
Выдает результат логического оператора AND заданного бинарного состояния сигналов.
Параметр
Задает число внешних или внутренних I/O сигналов.
Пояснение
Вычисляет логическое AND всех заданных бинарных состояний сигналов и выдает получающееся значение. Если все заданные сигнальные состояния истинны, выдается –1, если ложны, выдается 0.
Допустимые сигнальные номера
Внешние выходные сигналы – 1 – реально смонтированные
Внешние входные сигналы - 1001 – реально смонтированные
Внутренние сигналы – 2001 – 2256
Сигналы, заданные положительным числом, считаются TRUE, когда они включены, сигналы, заданные отрицательным числом считаются TRUE, когда они выключены. Никакой сигнал не соответствует «0» номеру, так что он всегда рассматривается как TRUE.
(ПРИМЕЧАНИЕ)
Есть ограничение синхронизации при обработке более чем одного сигнала в одно и тоже время. Когда происходит оценка более чем одного сигнала в одно и тоже время, обратите внимание, что есть 2 миллисекундное различие в стабилизации времени каждого сигнала.
Например
Если бинарные I/O сигналы имеют состояние 1001=ON, 1004=ON, 20=OFF, то

BITS (starting signal number, number of signal)
Назначение
Считывает последовательные двоичные сигналы и выдает десятичное значение в соответствии с битовой комбинацией заданных двоичных сигналов.
Параметры
1.Стартовый сигнальный номер
Задает первый сигнал для считывания
2. Количество сигналов
Задает количество сигналов для считывания, максимальное число 16.
Пояснение
Эта функция возвращает десятичное значение, соответствующее разрядному образцу указанных сигналов.
В двоичном выражении значения, возвращенного этой функцией, наименьшему значащему биту соответствует стартовый номер сигнала.
Допустимые сигнальные номера
Внешние выходные сигналы – 1 – реально смонтированные
Внешние входные сигналы - 1001 – реально смонтированные
Внутренние сигналы – 2001 – 2256
(ПРИМЕЧАНИЕ)
Есть ограничение синхронизации при обработке более чем одного сигнала в одно и тоже время. Когда происходит оценка более чем одного сигнала в одно и тоже время, обратите внимание, что есть 2 миллисекундное различие в стабилизации времени каждого сигнала.
Пример
![]()
Задается считывание четырех сигналов, начиная с 1003 (т.е. 1003, 1004, 1005, 1006). Если битовая комбинация будет следующей

т.е. 0101 – битовая комбинация, x присвоится десятичное значение 5.
TIMER (timer number)
Назначение
Выдает результирующее значение заданного таймера в секундах. Выражает таймерное значение момента, когда TIMER функция выполнилась.
Параметр
Задает, какой таймер считывать. Допустимые границы 1 – 10.
Пояснение
При использовании функции TIMER, значение таймера может быть считано в любой момент времени. Считывание и выдача результирующего времени (в секундах) происходит исходя из значений, предварительно заданных инструкцией TIMER. Если значение не было установлено программной инструкцией, значение функции TIMER выдается 0.
Номер 0 таймера устанавливается для системного счетчика времени. Значение, выдаваемое при задании этого таймера, есть общее затраченное время с момента первоначального запуска контроллера.
Пример

В данном примере показано, как используется инструкция и функция TIMER для показа времени, израсходованного при выполнении подпрограммы.
DISTANCE (transformation value, transformation value)
Назначение
Вычисляет расстояние между двумя точками, заданными в декартовых координатах.
Параметр
Декартовая координата, декартовая координата
Задает имена точек, между которыми необходимо рассчитать расстояние.
Пояснение
Выдает расстояние между двумя позициями в мм. (Две позиции могут вводится в любом порядке)
Пример
![]()
Вычисляет расстояние между текущим TCP и позицией “part”, и присваивает результат в k.
DX (transformation value)
DY (transformation value)
DZ (transformation value)
Назначение
Выдает декартовые значения X, Y, Z заданной позиции
Параметр
Декартовая координата
Задает имя позиции, из которой присваиваются значения.
Пояснение
Эти три функции выдают X, Y, или Z компоненты определенной позиции.
(ПРИМЕЧАНИЕ)
Каждый компонент декартовых значений может быть также получен, используя инструкцию DECOMPOSE. Значения для O, A, и T получаются, используя инструкцию DECOMPOSE.
Пример
Если точка с именем “start” имеет координаты

DEXT (pose variable name, element number)
Опция
Назначение
Присваивает указанный элемент указанной позиции.
Параметры
1.Задает позицию в угловых или декартовых координатах
2. Задает выводимый элемент реальным числом

Пример
Если декартовые координаты для точки “aa” 0, 0, 0,-160, 0, 0, 300, затем вводится функция как
![]()
300 устанавливается как значение седьмого сустава переменной “aa”.
ASC (string, character number)
Назначение
Присваивает ASCII значение заданного символа в строчном выражении.
Параметры
1.Строка
Задает строку, которая содержит символы, для которых ASCII значения необходимы. Если строка есть пустая строка или число, заданное для параметра «число символов» превышает реальное число символов в строке, выдается –1.
2.Количество символов
Задает количество символов, отсчитываемых от начала строки. Если параметр не задан или задан 0, или 1, выдается ASCII значение первого символа строки.
Пояснение
ASCII значение возвращается в реальных значениях.
Пример
![]()
Выдает ASCII значение для символа «а»
![]()
Выдает ASCII значение для первого символа строки “$name”
![]()
Выдает ASCII значение для i-го символа в строковой переменной “$system”
LEN(string)
Назначение
Выдает число символов в заданной строке
Параметр
Строка
Задает символьную строку, переменную символьной строки, строчное выражение
Пример
![]()
Выдает число символов строки “sample”, которое равно 6.
...TRUE…
...ON…
Назначение
Выдает логическое значение для TRUE (-1).
Пояснение
Эта функция удобна, когда необходимо определить логическое состояние TRUE.
Результат функций TRUE и ON одинаковы. Выбирается функция, которая лучше подходит к нуждам программы.
...FALSE…
...OFF…
Назначение
Выдает логическое значение для FALSE (0).
Пояснение
Эта функция удобна, когда необходимо определить логическое состояние FALSE.
Результат функций FALSE и OFF одинаковы. Выбирается функция, которая лучше подходит к нуждам программы.