

Slow_start
Назначение
Разрешает, запрещает функцию замедленного старта. Если разрешена, первая инструкция движения выполняется с медленной скоростью.
Если программа остановлена и перезапущена, первый шаг движения будет выполнен с медленной скоростью.
After.Wait.Timr
Назначение
Устанавливает синхронизацию для запуска таймеров в инструкциях блочного программирования.
Пояснение
Если переключатель в положении OFF, таймер запускается после совпадения осей. Если переключатель в состоянии ON, таймер запускается, когда оси совпадут и все установочные состояния (WX, WAIT, RPS ON) завершены.
По умолчанию состояние переключателя OFF.
8.0 Операторы
Эта глава описывает, как работают функции в AS языке. Эти операторы используются в соединении с мониторными командами и программными инструкциями.
8.1 Арифметические операторы
8.2 Относительные операторы
8.3 Логические операторы
8.4 Бинарные операторы
8.5 Операторы векторной алгебры
8.6 Строковые операторы
8.1 Арифметические операторы
Арифметические операторы используются для вычисления математических выражений.

MOD – остаток
^ - возведение в степень
Примеры
i = i+1 Значение i плюс 1 присваивается в iт.е. когда i есть 5, 6 будет присвоено в I как результат выражения i + 1, .
i = i MOD 2 Когда i = 5, оператор вычисляет 5 ÷ 2 и присваивает остаток 1 в i .
i = i^3 Значение i3 присваивается в i. Когда i=2, 8 присваивается в i с левой стороны инструкции.
При делении и вычислении остатка использование 0. как крайне правого значения выражения приведет к ошибке.
Пример
i = i/0
i = i MOD 0
8.2 Относительные операторы (операторы сравнения)
Относительные операторы используются с инструкциями такими, как IF, WAIT для проверки установленного состояния
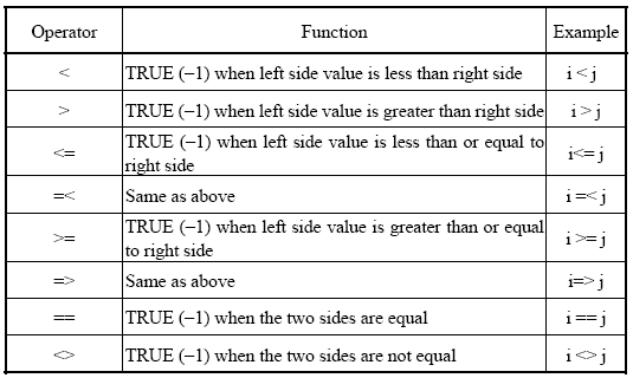
Примеры
Example
IF i<j GOTO 10 Когда j больше чем i, (т.е. инструкция i<j истинна), программа переходит на шаг с меткой 10, если нет, то программа обрабатывает следующий шаг.
WAIT t==5 Когда t есть 5 ( t==5 истинно), программа переходит для выполнения на следующий шаг, если нет программа ожидает до тех пор, пока состояние не установится.
F i+j>100 GOTO 20 Когда i + j больше чем 100 (т.е. выражение i + j > 100 истинно), программа переходит на шаг с меткой 20. Если нет, программа переходит для обработки следующего шага.
IF $a =="abc" GOTO 20 Когда $a есть “abc” (т.е. $a == “abc” истинно), программа переходит на шаг с меткой 20. Если нет, программа переходит для обработки следующего шага.
8.3 Логические операторы
Логические операторы используются в операциях Булевой алгебры, 0+1=1, 1+1=1, 0+0=0 (логическое ИЛИ), 0х1=0, 1х1=1, 0х0=0 (логическое И). В AS программном языке существует два типа логических операторов: логические и бинарные операторы.
Логические операторы используются не для вычисления числовых значений, а для определения истинности, ложности значения или выражения. Если числовое значение «0», считается FALSE (OFF), все ненулевые значения считаются TRUE (ON). Однако, заметьте, что при вычислении логического выражения, устанавливается –1 как TRUE (ON).

Например
i AND j
Вычисляет логическое AND между i и j. Переменные i и j обычно логические величины, но они могут быть и реальными числовыми значениями. В этом случае, все реальные числовые значения, отличные от нуля рассматриваются как ON (TRUE).
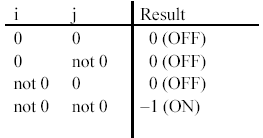
Результат истинен, когда оба значения истинны.
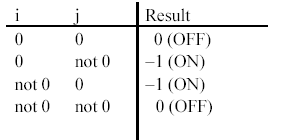
i OR j

Результат истинен, когда оба или одно из значений истинны.
i XOR j
Результат истинен, когда одно их двух значений истинно.
NOT i

Вычисляет логическое дополнение i.
В AS, логическое состояние значения или выражения может быть выражено следующим образом:
Истинно: not 0, ON, TRUE
Ложно: 0, OFF, FALSE