

Dispio_01
Назначение
Меняет вид отображения внешних I/O сигналов и внутренних сигналов при использовании команды IO.
Пояснение
Если системный переключатель в состоянии OFF, “o” показывает включенные сигналы, “x” показывает выключенные сигнала. Приоритетные сигналы показываются соответственно заглавными буквами (“O”, “X”).
Если системный переключатель в состоянии ON, “1” показывает включенные сигналы, “0” показывает выключенные сигналы, “-“ показывает сигналы, которые не инсталлированы.
По умолчанию установка переключателя OFF. (см. 5.6)
Пример
DISPIO_01 в состоянии OFF

DISPIO_01 в состоянии ON

Hold.Step
Назначение
Выбирает шаг, показывающий, где программное выполнение приостановлено.
Пояснение
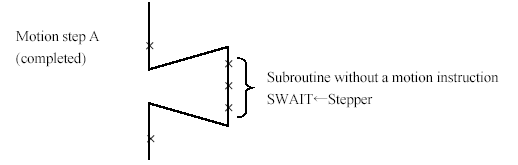
Если системный переключатель в состоянии ON и программное выполнение приостанавливается в момент выполнения инструкции, не содержащей движение, шаг, выполненный в настоящее время, отображается вместо инструкции движения, только что законченной.
Для примера на рисунке ниже, если переключатель в состоянии ON,отображается шаг SWAIT (SWAIT может быть перепрыгнут), если в состоянии OFF, отображается шаг движения А.
По умолчанию установка OFF.
Ws_compoff
Опция
Назначение
Меняет выходное состояние сварочного сигнала (WS).
Пояснение
Если переключатель в состоянии ON, синхронизация выходных сварочных сигналов меняется с момента изменения памяти до момента, когда принят ввод законченного сварочного сигнала.
Если переключатель в состоянии OFF, сварочные сигналы выводятся в каждом изменении памяти.
По умолчанию состояние переключателя OFF.
Flowrate
Опция
Назначение
Переключается между режимом управления расходом и режимом вывода скоростей
Пояснение
Если этот переключатель в состоянии ON, выбирается режим управления расходом.
Если этот переключатель в состоянии OFF, выбирается режим вывода скоростей.
По умолчанию установка OFF.
WS.ZERO
Опция
Назначение
Меняет совершаемую операцию, когда сварочный сигнал устанавливается в 0.
Пояснение
Если переключатель в состоянии ON, сварка совершается, когда WS=0, также как когда WS не равно 0. (Герметизация и сварка).
Если переключатель в состоянии OFF, сварка не совершается, когда WS=0. (Только герметизация).
По умолчанию состояние переключателя устанавливается OFF.
Abs.Speed
Назначение
Разрешает, запрещает использование абсолютной скорости. Эта функция разрешает выполнение шагов движения при низкой предопределенной установке скорости, эффективной для полной программы и принимающей приоритет над установленной мониторной скоростью.
Пояснение
Если этот переключатель в состоянии ON, робот движется с абсолютной скоростью, заданной в программе, когда следующее состояние верно.
![]()
Пример
Если максимальная скорость 2400 mm/s, мониторная скорость 10%, программная скорость 100 mm/s
2400 х 0.1 > 100
Робот движется со скоростью 100 mm/s.
Если максимальная скорость 100%, мониторная скорость 10%, программная скорость 5%, то
100 × 0.1 >5
Поэтому, робот движется с программной скоростью 5%.
Если максимальная скорость 2400 mm/s, мониторная скорость 2%, программная скорость 100 mm/s
2400 х 0.02 < 100
Поэтому робот движется со скоростью 48 mm/s.