

2.6 Работа с персональным компьютером
2.6.1 Запуск системы
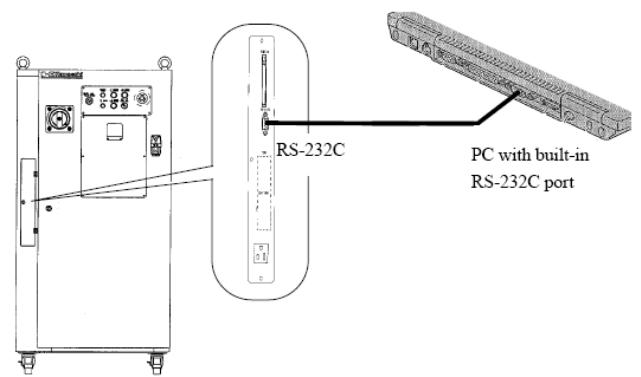
2.6.1.1 Подключение к порту rs -232c
1. Подключите персональный компьютер к контроллеру, используя кабель RS-232C. Удостоверьтесь, что силовое питание контроллера и компьютера выключено.
2. Включите компьютер, и запустите программное обеспечение терминала (KRterm или KCwin32, диаграммы ниже касаются KRterm).
3. Когда программное обеспечение открывается, выберите тип подключения для использования. Выберите из строки меню,
[Communication (C)] →[Connect Parameter (O)].

4. Щелкните “Serial” строку, проверьте содержимое, и если все нормально, щелкните <OK>.

5. Включите силовое питание контроллера.
(См. “Руководство оператора” 3.1 Процедура включения силового питания.
6. Первоначальный экран KRterm следует за подсказкой “>”, которая появится на экране.
Когда силовое питание включено до подключения РС и контроллера, появится только подсказка “>” без первоначального экрана. Тем не менее, KRterm работает одинаково.
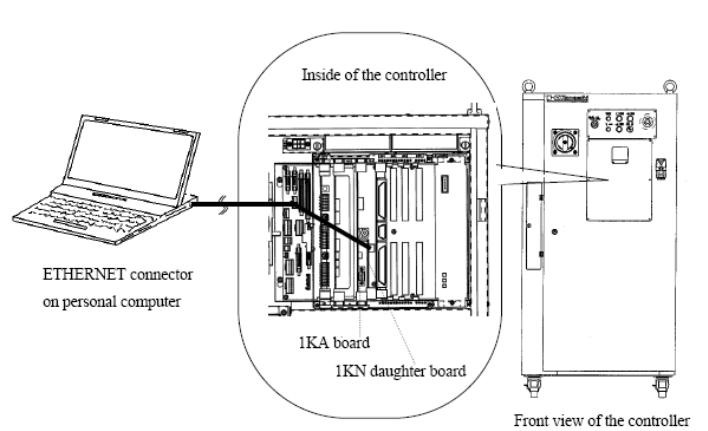
2.6.1.2 Подключение роботов, используя сеть ethernet
1. Подключение кабелей.
Подключите ETHERNET разъем на вашем персональном компьютере и разъем на дополнительной 1 KN дочерней плате на 1 KA плате в контроллере, используя кабель локальной сети.
2. Следуя шагам 2 и 3, описанных выше, запустите KRterm и робот.
3. Установите IP адрес робота.
(1) Перейдите из строки меню [Communication] → [Connect Parameter (O)].

(2) Введите IP адрес и имя робота, который вы хотите подключить к сети и нажмите <ADD>.

4. Для того чтобы подключиться с роботом, следуйте за процедурами, описанными ниже.
(1) Робот, подключенный последним, отображен наверху спускающегося меню, когда
[Communication (C)] выбрана от строки меню. Нажмите имя робота, для того чтобы выбрать робот.
(2) Выберите из строки меню [Communication(C)] → [Connect.History(C)], чтобы отобразить список используемых роботов. Выберите робот для подключения из списка.

3) Выберите из строки меню [Communication(C)] → [Select Connect(E)], если желательный робот не появляется при пользовании вышеупомянутых способов.

Выберите желательный робот, и нажмите <CONNECT>.

Если подключение установлено, информация робота типа его имени, сопровождаемого подсказкой “>”, появляется на KRterm экране. AS команды могут быть введены, как только подсказка появляется.
2.6.2 Загрузка и выгрузка данных
(1) SAVE команда
Чтобы сохранять данные относительно компьютера, используйте команду SAVE (См. 5.3 команда SAVE).
Пример> SAVE test.pg, сохраняет данные в том же самом каталог, в котором находится
KRterm на компьютерном жестком диске.
> SAVE test.pg ¥ My Documents сохраняет данные в указанном файле.
(2) LOAD команда
Чтобы загружать данные из компьютера в память робота, используйте команду LOAD.
Пример> LOAD data01.as