

Prefetch.Sigins
Назначение
Разрешает, запрещает более раннюю обработку команд сигналов входа, выхода. Функционирует аналогично OX.PREOUT, но эффективен только для AS программирования.
Пояснение
Если переключатель выключен (OFF), команды для сигналов входа, выхода и синхронизация, описанная выше, не выполнятся до тех пор, пока не произойдет совпадение осей с точкой, обученной в текущей инструкции движения.
SWAIT, SIGNAL, TWAIT, PULSE, DLYSIG, RUNMASK, RESET, BITS
Если переключатель включен (ON), команды, указанные выше, выполняются, как только начинается движение в заданную точку, программа обрабатывается вплоть до следующей инструкции движения.
По умолчанию переключатель находится в состоянии OFF.
QTOOL
Назначение
Разрешает, запрещает использовать преобразования инструмента во время обучения в режиме блочного программирования.
Пояснение
Если переключатель включен, следующие функции возможны во время обучения:
1. Автоматический выбор инструментальной системы координат.
Если дополнительные данные для инструмента задаются в текущем шаге, преобразования инструмента регистрируются как инструмент (TOOL) номер 1 – 9
Если AS команда для инструмента задана в текущем шаге, инструментальная система координат остается неизменной
Если ничего не задано в текущем шаге, а на пульте ручного управления отображена строка дополнительных данных, робот движется соответственно в той инструментальной системе, которая зарегистрирована в строке дополнительных данных в настоящий момент в соответствии с номером инструмента
Если ничего не задано в текущем шаге, и на пульте ручного управления нет строки дополнительных данных, инструментальная система координат остается неизменной
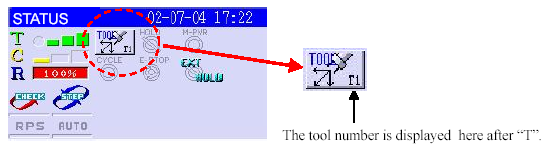
2. Реальный номер инструментальной системы координат отображается на дисплее пульта ручного управления в статус области в верхнем правом углу экрана
Если переключатель выключен, и используется инструментальная система, заданная в AS инструкции, номер инструмента на экране будет 0.
Если переключатель выключен (OFF), инструментальная система координат изменяется при выполнении команды TOOL или выполнении инструкции TOOL, или блочной инструкции внутри программы.
По умолчанию переключатель находится в состоянии ON.
RPS
Назначение
Разрешает, запрещает случайный выбор программ.
Пояснение
Если этот переключатель выключен (OFF), инструкция EXTCALL и дополнительные данные JUMP/END игнорируются
По умолчанию переключатель находится в состоянии OFF.
SCREEN
Назначение
Разрешает, запрещает пролистывание экрана.
Пояснение
Если переключатель включен (ON), пролистывание экрана останавливается, когда экран заполняется. Нажимая Spacebar, выводим следующую информацию.
По умолчанию переключатель находится в состоянии ON.
REP_ONCE
Назначение
Определяет, как выполняется программа, один раз или непрерывно.
Пояснение
Если переключатель включен (ON), программа выполняется один раз. Если выключен, непрерывно.
По умолчанию переключатель находится в положении OFF.
STP_ONCE
Назначение
Определяет, как выполняются шаги программы, по отдельным шагам или непрерывно.
Пояснение
Если переключатель включен (ON), программа выполняется по отдельным шагам. Если выключен, непрерывно.
По умолчанию переключатель находится в положении OFF.
AUTOSTART.PC
AUTOSTART2.PC
AUTOSTART3.PC
AUTOSTART4.PC
AUTOSTART5.PC
Опция
Назначение
Определяет автоматический старт выбранной PC программы по включению силового питания.
Пояснение
Если переключатель включен (ON), программа, названная AUTOSTART.PC стартует автоматически по включению силового питания. Пять различных PC программ могут быть выбраны для автоматического старта, каждая из них названа AUTOSTART.PC, AUTOSTART2.PC – AUTOSTART5.PC. Включение каждого переключателя запускает соответствующую программу.
По умолчанию переключатель находится в положении OFF.
(ПРИМЕЧАНИЕ)
Если этот переключатель находится в состоянии ON, но соответствующих программ не существует, произойдет ошибка и появится сообщение “Program does not exist”.