

6.9. Инструкции позиционной информации
HERE Задает текущую позицию как позиционную переменную.
POINT Задает позиционную переменную.
POINT/X Устанавливает Х значение позиционной переменной.
POINT/Y Устанавливает Y значение позиционной переменной.
POINT/Z Устанавливает Z значение позиционной переменной
POINT/OAT Устанавливает OAT значения позиционной переменной
POINT/O Устанавливает O значение позиционной переменной
POINT/A Устанавливает A значение позиционной переменной
POINT/T Устанавливает T значение позиционной переменной
POINT/7 Устанавливает значение седьмой координаты позиционной переменной
DECOMPOSE Присваивает компоненты позиционной переменной в элементы массива переменных.
TOOL Задает положение TCP.
BASE Изменяет систему базовых координат робота.
LLIMIT Устанавливает верхний предел для движения робота.
ULIMIT Устанавливает нижний предел для движения робота.
TIMER Устанавливает таймер.
UTIMER Устанавливает таймерное значение пользовательского таймера.
ON Устанавливает состояние ON системного переключателя
OFF Устанавливает состояние OFF системного переключателя.
NCHON Устанавливает состояние ON режекторного фильтра (опция)
NCHOFF Устанавливает состояние OFF режекторного фильтра (опция)
WEIGHT Устанавливает данные весовой нагрузки.
MC Выполняет мониторную команду из PC программ.
PLCAOUT Устанавливает реальные значения в выходные данные(опция)
TPLIGHT Устанавливает подсветку пульта ручного управления.
HERE pose variable name
Назначение
Задает имя переменной координаты в текущей позиции. Позиция может задаваться как декартовая, угловая, сложная координата.
Параметр
Имя координаты точки
Присваивает координате обученной точки имя. Позиция может задаваться как декартовая, угловая, сложная координата.
(ПРИМЕЧАНИЕ)
Только крайне правая переменная сложной координаты задается. Если другие переменные, используемые в сложной координате, не заданы, произойдет ошибка при выполнении этой команды.
См. мониторную команду 5.5
POINT pose variable name1=pose variable name2, joint displasment values
Назначение
Присваивает координату точки, заданной в правой части равенства координате точки, заданной в левой части равенства.
Параметры
1.Определяет имя координаты, которую необходимо задать (декартовую, угловую, сложную)
2.Задает имя реально существующей координаты. Если параметр не задан, на дисплее появляются координаты точки pose variable name с запросом на изменение “Change?”. При этом можно изменить координату точки, поставив
на соответствующие координаты необходимые значения. Выполнение команды и ее закрытие происходит путем нажатия клавиши (Enter).
3.Этот параметр должен быть установлен, когда в левой части равенства координата задается, как угловая, а первая координата правой части равенства, как декартовая. (если параметр слева не является угловой координатой, этот параметр не может быть установлен). Угловая координата правой части равенства определяет конфигурацию робота в пространстве в новой позиции. Если параметр, не задан текущая конфигурация будет использоваться, для того чтобы определить переменную позиции
Пояснение
Ошибка получится, если переменная позиции с правой стороны “=” не определена.
Только крайне правая переменная сложной координаты задается. Если другие переменные, используемые в сложной координате, не заданы, произойдет ошибка при выполнении этой команды.
Примеры
>POINT #park
JT1 JT2 JT3 JT4 JT5 JT6
10.000 15.000 20.000 0.000 30.000 90.000
Change? (if not, hit RETURN only) (Enter)
,,,35
JT1 JT2 JT3 JT4 JT5 JT6
10.000 15.000 20.000 35.000 30.000 90.000
Change? (if not, hit RETURN only) (Enter)
>POINT pick1=pick (Enter)
присваивает декартовой координате pick1 значение декартовой координаты pick
>POINT pos0=#pos0 (Enter)
преобразует угловую координату #pos0 в декартовую и присваивает декартовой координате pos0 данное значение
>POINT #pos1=pos1,#pos2 (Enter)
преобразует декартовую координату “pos1” в угловую, используя конфигурацию робота, определенную позицией #pos2, присваивает это значение точке “#pos1”
Является мониторной командой см. 5.5
POINT/X transformation variable name1=transformation values2
POINT/Y transformation variable name1=transformation values2
POINT/Z transformation variable name1=transformation values2
POINT/OAT transformation variable name1=transformation values2
POINT/O transformation variable name1=transformation values2
POINT/A transformation variable name1=transformation values2
POINT/T transformation variable name1=transformation values2
POINT/7 transformation variable name1=transformation values2
Назначение
Присваивает элементы декартовой координаты, заданной в правой части равенства соответствующим элементам декартовой координаты, определенной в левой части равенства. Эти значения будут отображены на дисплее для редактирования.
Параметры
Имя декартовой координаты 1
Выбирает имя декартовой координаты для изменения координатного значения.
Имя декартовой координаты 2
Выбирает имя декартовой координаты, из которой будут взяты необходимые данные для изменения. Точка должна быть заранее обучена, она может быть простой, сложной точкой или функцией декартовой точки.
Если задана сложная точка в левой части равенства, эта инструкция определит только крайнее правое значение в этой сложной точке.
Пояснение
Ошибка получится, если переменная позиции с правой стороны “=” не определена.
Если сложная координата задана в левой части равенства, эта инструкция задает только крайне правое значение сложной координаты. Если другие переменные, используемые в сложной координате, не заданы, произойдет ошибка при выполнении этой команды.
Пример
![]()
DECOMPOSE array variable name[element number]=pose variable name
Назначение
Записывает как элементы массива каждый компонент координаты заданной позиции (X,Y,Z,O,A,T, или JT1,JT2,JT3,JT4,JT5,JT6)
Параметр
1.Имя массива переменных
Задает имя массива переменных, в котором значения каждого компонента позиции будет записано.
2.Номер элемента
Задает первый элемент, с которого записываются компоненты.
3.Имя позиции (координаты)
Задает имя позиции, для которой выделяется каждый компонент.
Пояснение
Происходит присвоение элементов выбранной позиции элементам массива переменных.
При задании декартовой координаты шесть элементов координаты присваиваются шести элементам массива. При задании угловой координаты каждому элементу присваивается угловое значение соответствующих суставов робота.
Пример
![]()
Присваивает координатные значения точки “part” первых шести элементам массива X.
![]()
Присваивает угловые значения точки #pick элементам массива angles, начиная с четвертого элемента и т.д.
Для примера, если значение #pick (10, 20, 30, 40, 50, 60), то массив будет

BASE transformation values
Назначение
Задает сдвиг начала координат (0,0,0,0,0,0) декартовой системы координат на определенные величины (X,Y,Z,O,A,T), заданные в параметре, создавая тем самым новую относительную систему координат.
Параметр
Имя точки (точка декартовая, сложная)
Определяет новую базовую систему координат. Точка здесь описывает положение начала координат новой системы по отношению к началу координат нулевой базовой системы координат. Если параметр не определен, на дисплее появляется информация об установленной системе координат в данный момент времени.
Пояснение
Команда BASE используется, как правило, когда есть неоднократно повторяющиеся траектории движения. Задается траектория движения в нулевой системе координат, затем, задав нужную базовую систему, без обучения точек, произойдет повторение траектории движения.
Следует учитывать, что координата точки (параметр) не может быть создана, путем обучения и запоминая, используя команду HERE. Координата точки создается аналитически (вычисляется) и вводится в память компьютера при помощи команды POINT.
Является мониторной командой
TOOL transformation values
Назначение
Определяет новую инструментальную систему координат, которая задается как сдвиг нулевой инструментальной системы на определенные расстояния, выраженные в координатах X,Y,Z,O,A,T
Параметр
Имя точки (точка декартовая, сложная)
Определяет новую инструментальную систему координат. Параметр здесь описывает положение начала координат новой системы по отношению к началу координат нулевой инструментальной системы координат. Если параметр не определен, на дисплее появляется информация об установленной инструментальной системе координат в данный момент времени.
Пояснение
Инструментальная система координат с началом 0,0,0,0,0,0 находится в центре фланца робота (6-ой сустав), плоскость XOY совпадает с плоскостью фланца, ось Z параллельна оси фланца.
Если установлена нулевая инструментальная система координат, вращение вокруг осей оставляет неподвижной точку начала инструментальной системы координат, но при наличии инструмента (все технологические операции требуют наличие какого-нибудь инструмента), конец инструмента перемещается в пространстве. При обучении и дальнейшем прохождении сложных траекторий, особенно, где требуется изменение ориентации на небольших расстояниях по ходу движения, могут возникнуть осложнения такие, как неравномерное движение от точки к точке, невозможность пройти по прямой траектории, во время сложного перехода возможно столкновение с обрабатываемой поверхностью. Чтобы избежать данных ситуаций используется команда TOOL. Начало координат переносится на конец инструмента и при вращении неподвижной остается рабочая часть инструмента.
Является мониторной командой
ULIMIT joint displacement values
LLIMIT joint displacement values
Назначение
Устанавливает и отображает верхний/нижний пределы границ движения робота.
Параметр
Имя точки в угловых координатах
Устанавливает программно новые пределы (верхний/нижний) границ движения робота в угловых координатах. Если параметр не задан, отображается текущее положение робота, которое можно изменить или не менять в зависимости от ответа на вопрос “Change?”.
Пояснение
Если параметр задан, на дисплее появляются угловые координаты точки, которые можно изменить после вопроса “Change?”, на необходимые пользователю.
Является мониторной инструкцией
TIMER timer number=time
Назначение
Задает время определенного таймера.
Параметры
1.Номер таймера. Допустимые номера от 1до 9.
2.Время
Задает время в секундах для заданного таймера.
Пояснение
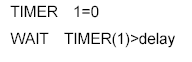
Когда эта инструкция выполняется, таймер немедленно устанавливается на указанное время. Проверить значение таймера можно, используя функцию TIMER.
В примере, показанном ниже? программное выполнение приостанавливается на время, заданное инструкцией TIMER и функцией TIMER.
Пример
UTIMER @timer variable=timer value
Назначение
Устанавливает значение по умолчанию для пользовательского таймера. Пользовательский таймер может быть назван произвольно, используя переменные таймера.
Параметры
1.@Переменная таймера
Задает имя переменной или массива переменных, используемое как имя таймера.
2.Значение таймера
Задает по умолчанию значение для таймера. Допустимые числа от 0 до 2147483647 (секунды).
Switch name,.... ON
Switch name,....OFF
Назначение
Задавая имя системного переключателя, устанавливается состояние включения/выключения в соответствии с ON/OFF
Параметр
Имя переключателя
Устанавливает состояние ON/OFF для переключателя, заданного здесь. При задании более чем одного имени, они разделяются запятой.
Текущая установка системного переключателя может быть проверена при помощи SWITCH команды.
Является мониторной командой.
NCHON NCHOFF
Назначение
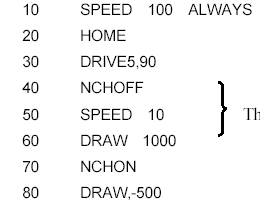
Включает/выключает фильтр-пробку в шагах движения в соответствии заданным шагам. NCHON разрешает фильтр-пробку, NCHOFF запрещает.
Пример
(ПРИМЕЧАНИЕ)
Нормально, когда используется NCHON.
NCHOFF используется, чтобы устранить небольшие вибрации, возникающие при медленных скоростях, или когда внешние силы влияют на устойчивость движения робота.
Фильтр сбрасывается с выполнением команды EXECUTE. Он также сбрасывается, когда впервые выполняются команды PRIME, STEP, MSTEP. По умолчанию установка ON (режекторный фильтр разрешен).
WEIGHT load mass,center of gravity location X, center of gravity location Y,
center of gravity location Z, inertia moment ab. X axis,