

If condition goto label
Назначение
Переходит к шагу с указанной меткой, когда данное состояние установлено.
Параметр
1. Состояние
Определяет условие в выражениях, например n = = 0, n> 3, м. + n <0.
2. Метка
Определяет метку шага, в который надо перейти (не номер шага). Метка должна быть в пределах этой же программы.
Объяснение
Переходит к шагу, указанному меткой. Если состояние определено, программа делает переход, когда состояние установлено. Если состояние не установлено, выполнение продолжается к следующему шагу после этой инструкции. Если указанная метка не существует, происходит ошибка.
Если значение целой переменной номера “n” больше чем 3, то программа переходит к шагу с меткой 100. Если n не больше чем 3, тогда шаг после этого шага выполняется.
Если значение целой переменной - не 0, программа переходит к шагу с меткой 25. Если значение переменной равно 0, программа переходит на следующий шаг выполнен.
Это то же самое как запись: IF flag <> 0 GOTO 25.
![]()
![]()
CALL program name
Назначение
Прекращает выполнение программы и переходит к выполнению другой программы или подпрограммы, начиная с первого шага. Когда выполнение подпрограммы закончено, происходит возврат в головную программу на шаг, следующий за этой инструкцией.
Параметр
Программное имя
Выбирает имя подпрограммы для выполнения.
Пояснение
Эта команда временно останавливает выполнение текущей программы и переходит к первому шагу указанной подпрограммы.
(ПРИМЕЧАНИЕ)
Одна и та же подпрограмма не может одновременно вызываться из управляющих программ робота и РС программ, т.к. подпрограмма не может вызвать сама себя.
До 20 программ могут быть приостановлены, когда вызываются подпрограммы.
![]()
Переходит в подпрограмму, названную “sub1”. Когда команда RETURN в
“sub1” выполнена, программное выполнение возвращается к первоначальной программе, и выполняет программу с шага после этой инструкции CALL.
RETURN
Назначение
Заканчивает выполнение подпрограммы и возвращает на шаг головной программы, следующий за CALL инструкцией.
Пояснение
Эта инструкция заканчивает выполнение подпрограммы и возвращается в программу, которая вызвала подпрограмму. Если подпрограмма не вызывается другой программой (Если подпрограмма выполняется в мониторном режиме при помощи команды EXECUTE) программное выполнение заканчивается.
В конце подпрограммы программное выполнение возвращается в первоначальную программу, даже если нет инструкции RETURN. Однако инструкция RETURN должна быть записана как последний шаг подпрограммы (или в любом месте подпрограммы, для того чтобы ее завершить).
WAIT condition
Назначение
Заставляет ждать выполнение определенного состояния для продолжения выполнения программы
Параметр
Выбирает дублирующее условие. (Реальное числовое выражение)
Пояснение
Эта инструкция останавливает выполнение программы до выполнения определенного условия. CONTINUE NEXT команда продолжает программное выполнение, не дожидаясь установки условия. (перепрыгивает инструкцию WAIT)
WAIT SIG(1001, − 1003) приостанавливает выполнение программы до тех пор, пока внешний входной сигнал 1001 (WX1) не станет ON и сигнал 1003(WX3) не станет OFF.
WAIT TIMER(1)>10 приостанавливает выполнении программы, пока значение таймера не превысит 10 секунд.
WAIT n>100 приостанавливает выполнении программы, пока значение переменной “n” не превысит 100. (в этом примере предполагается. Что значение переменной “n” считается либо в РС программе, либо в программе прерывания.)
TWAIT time
Назначение
Останавливает программное выполнение до истечения определенного времени.
Параметр
Задается время в секундах для останова выполнения программы.
Пояснение
Эта инструкция приостанавливает программное выполнение до тех пор, пока не пройдет заданное время.
A TWAIT инструкция при выполнении может быть перепрыгнута при помощи команды CONTINUE NEXT.
WAIT инструкция может быть использована вместо TWAIT инструкции, получится тот самый результат.

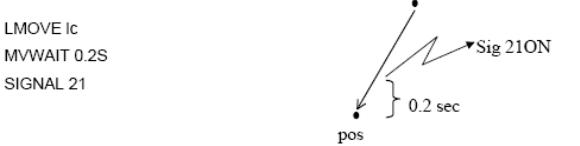
MVWAIT value
Назначение
Останавливает программное выполнение пока оставшееся расстояние или время текущего движения не становится меньше чем заданное расстояние или время.
Параметр
Значение
Задает расстояние в миллиметрах или время в секундах. Если единица измерения не задана, по умолчанию воспринимается как миллиметры.
Пояснение
Эта инструкция используется для одновременного выполнения программы и движения робота. Однако обратите внимание, что после того как инструкция отследит оставшееся расстояние (время), заданное в параметре, оно может отличаться от действительно оставшегося расстояния (времени) из-за задержки ответа. Когда робот совершает движение по криволинейной траектории, заданное расстояние и действительное могут значительно различаться. Если текущее движение завершено полностью во время выполнения этой инструкции, выполнение программы продолжается. CONTINUE NEXT команда может продолжить выполнение программы, пропуская эту инструкцию.
(ПРИМЕЧАНИЕ)
MVWAIT инструкция не может использоваться в РС программах, также она не является мониторной командой.
Пример
На диаграмме ниже, робот движется по направлению к позиции “pos”, и когда он войдет внутрь 100 мм до “pos”, выходной сигнал 21 включится. Это верно только тогда, когда сигнал считывается впереди стоящей функцией (PREFETCH.SIGINS) в состоянии ON и робот находится в диапазоне точности.

На диаграмме ниже, робот движется по направлению к позиции “pos”, и когда требуемое время для достижения точки станет 0.2 секунды, выходной сигнал 21 включится. Это верно только тогда, когда сигнал считывается впереди стоящей функцией (PREFETCH.SIGINS) в состоянии ON и робот находится в диапазоне точности
LOCK priority
Назначение
Меняет приоритет программы, в настоящее время выбранной в стеке.
Параметр
Задает приоритет в реальных числах от 0 до 127
Пояснение
Нормально, когда приоритет программы робота 0. Приоритет может быть изменен при помощи этой инструкции. Чем больше число, тем выше приоритет.
Пример
![]()
Изменяет приоритет программы на 2.
PAUSE
Назначение
Временно останавливает программное выполнение
Пояснение
Эта инструкция временно останавливает выполнение программы и отображает сообщение на терминале. Выполнение может быть продолжено CONTINUE командой.
Использование инструкции удобно в наладочном (проверочном) режиме. Значения переменных могут быть проверены во время программного останова инструкцией PAUSE.
HALT
Назначение
Останавливает программное выполнение. Программа не может быть продолжена после выполнения этой инструкции никакими командами, не взирая на оставшиеся шаги программы. На терминале появляется сообщение.
Пояснение
Останавливает выполнение программы, независимо от оставшихся шагов. На экране появляется сообщение.
Выполнение программы, прерванное этой инструкцией не может быть возобновлено использованием команды CONTINUЕ.
STOP
Назначение
Заканчивает текущее выполнение цикла.
Пояснение
Если есть циклы, которые должны быть завершены, выполнение возвращается на первый шаг, иначе выполнение заканчивается. Инструкция обозначает конец выполняемой части программы и отличается от HALT инструкции.
Если есть оставшиеся для выполнения циклы, выполнение продолжается с первого шага основной программы* (даже если STOP инструкция была выполнена во время выполнения подпрограммы или программы прерывания, выполнение возвращается в основную программу).
ПРИМЕЧАНИЕ* Основная программа – программа, выполняемая при помощи использования команд EXECUTE, STEP, PCEXECUTE
Подпрограмма – это программа, вызываемая из другой программы при помощи инструкций CALL, ON или ONI.
RETURN инструкция в основной программе функционирует тем же способом как STOP инструкция. Программное выполнение, остановленное инструкцией STOP не может быть продолжено командой СONTINUE.
SCALL string expression, variable
Назначение
Переходит к выполнению программы с именем, данным посредством строчного выражения
Параметры
1.Строчное выражение
Задает имя подпрограммы в виде строчного выражения.
2.Переменная
Если подпрограммный вызов выполняется нормально, значение 0 присваивается этой переменной. Если некоторая ненормальность произошла в течение вызова подпрограммы, назначается код ошибки (не 0). Если параметр опущен, выполнение приходит в останов по ошибке, когда неправильность происходит в вызванной подпрограммеl.
Пояснение
Эта инструкция функционирует также как CALL инструкция за исключение того, что программное имя выражается строчным выражением.
Пример

Переходит к подпрограмме с именем “sub1”
Преобразовывает в строчное выражение реальную величину, заданную переменной “num” и переходит к выполнению подпрограммы “sub12”.
ONE program name
Назначение
Вызывает определенные программы, когда происходит ошибка.
Пояснение
Эта инструкция вызывает определенные программы, когда происходит ошибка. РС программа также может быть вызвана.
RETURN инструкция возвращает выполнение в шаг, где ошибка произошла. RETURNE инструкция возвращает выполнение на шаг после ошибки. Если ни та, ни другая инструкция не встречается внутри программы, выполнение цикла останавливается в конце вызванной программы.
Инструкции движения не могут быть использованы в программах, вызываемых инструкцией ONE.
Если ошибка происходит в программе, вызываемой ONE, программное выполнение останавливается на этом месте.
(ПРИМЕЧАНИЕ)
Пока основная программа, содержащая данную инструкцию, выполняется, эффективность ее распространяется и на подпрограммы, вызываемые в основной программе. Если вызов программы осуществляется ONE инструкцией, и ошибка произошла, лампочка ERROR не загорается.
RETURNE
Назначение
Возвращается в шаг, следующий за ошибкой.
Эта инструкция, как правило, парна с ONE инструкцией. С ONE инструкцией программа переходит в подпрограмму, когда происходит ошибка. Затем выполнение возвращается в шаг после ошибки в первоначальную программу, когда выполнится инструкция RETURNE в подпрограмме.
CALLAUX auxiliary function number
Назначение
Отображает указанный экран вспомогательных функций.
Параметр
Номер вспомогательных функции
Указывает номер вспомогательной функции от 1 до ХХХХ.
Пояснение
1. Разрешает от отображение и установку вспомогательной функции из программы.
2. Если программное выполнение останавливается, в то время как начинает выполняться инструкция CALLAUX , экран вспомогательных функций отключается. Если инструкцияe CALLAUX выполняется в нескольких программах, CALLAUX инструкция ожидает до тех пор, пока первая инструкция CALLAUX завершится.
3. Если задан неопределенный номер вспомогательной функции в этой инструкции , произойдет ошибка Error(P2030)Undefined function number. Задавайте номер от 1 до XXXX. (Обратите внимание, что не каждый номер присвоен функциям).