

6.4. Инструкции конфигурации робота
RIGHTY Изменяет конфигурацию так, что рука робота напоминает правую руку человека.
LEFTY Изменяет конфигурацию так, что рука робота напоминает левую руку человека.
ABOVE Изменяет конфигурацию так что локтевой находится сверху.
BELOW Изменяет конфигурацию так что локтевой находится снизу.
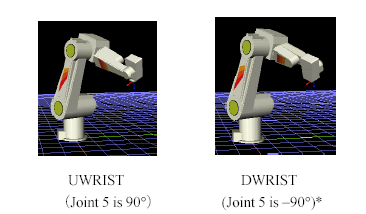
UWRIST Изменяет конфигурацию так, что угол 5 сустава имеет положительное значение.
DWRIST Изменяет конфигурацию так, что угол 5 сустава имеет отрицательное значение.
.
RIGHTY LEFTY
Назначение
Вынуждает изменить конфигурацию руки робота во время следующего движения, так что рука робота будет напоминать правую или левую руку человека, т.е. происходит изменение положения первых трех суставов, а положение запястья в пространстве не изменяется. Конфигурация не может быть изменена во время линейного интерполированного движения, или когда точка назначения задана в угловых величинах.

ABOVE
BELOW
Назначение
Вынуждает изменить конфигурацию руки робота во время следующего движения, так что локоть руки робота (третий сустав) будет напоминать локоть руки человека в положении локоть вверх (локоть вниз) относительно запястья, положение запястья в пространстве не изменяется. Конфигурация не может быть изменена во время линейного интерполированного движения, или когда точка назначения задана в угловых величинах.

UWRIST DWRIST
Назначение
Вынуждает изменить конфигурацию руки робота во время следующего движения, так что угол пятого сустава робота принимает положительное или отрицательное значение. Конфигурация не может быть изменена во время линейного интерполированного движения, или когда точка назначения задана в угловых величинах.
6.5. Инструкции управления программой
GOTO Переходит к определенной метке.
IF Переходит к определенной метке, когда условие выполнено.
CALL Переходит к подпрограмме.
RETURN Возвращается в программу, которая вызвала подпрограмму.
WAIT Помещает программное выполнение в готовность продолжить действие, как только состояние установится.
TWAIT Помещает программное выполнение в готовность продолжить действие, как только установленное время пройдет
MVWAIT Помещает программное выполнение в готовность продолжить действие, как только данное расстояние или время будет достигнуто.
LOCK Изменяет приоритет управляющих программ робота.
PAUSE Приостанавливает программное выполнение.
HALT Прекращает программное выполнение. (Продолжение невозможно)
STOP Останавливает цикл выполнения.
SCALL Переходит к подпрограмме.
ONE Вызывает программу, когда происходит ошибка.
RETURNE Выполняет с шага, следующего за шагом, где произошла ошибка
CALLAUX Отображает экран вспомогательных функций. (опция)
GOTO lable IF condition
Назначение
Переходит на программный шаг, в соответствии с меткой
Параметр
1.Метка
Задается метка программного шага для перехода к этому шагу. Метка задается целым числом от 0 до 32767
2.Условие
Задает условие для перехода, т.е. если условие выполнено происходит переход на шаг программы с заданной меткой. Если параметр не задан, переход происходит автоматически на заданную метку.
Следует различать метку и номер шага программы. Каждый шаг программы имеет свой номер, но может не иметь метки
Пояснение
Переходит к шагу, указанному меткой. Если состояние определено, программа делает переход, когда состояние установлено. Если состояние не установлено, выполнение продолжается к следующему шагу после этой инструкции.
Обратите внимание, что метка и номер шага отличаются. Номера шагов присваиваются всем шагам программы автоматически системой. Метки присваиваются выборочно в программные шаги и вводятся после номера шага.
Функции команды те же самые, как у команды IF GOTO, когда состояние определено.
